什么是車載以太網?為什么汽車的智能網聯、自動駕駛、無人駕駛甚至智能駕駛艙的發展都離不開車載以太網?接下來,我們簡單介紹一下車載以太網。汽車以太網是一種新的局域網技術,通過以太網連接汽車中的電子單元。傳輸介質為單對非屏蔽雙絞線或光纖,傳輸速率為100 Mbit/s ~ 10 Gbit/s,同時也滿足汽車行業對高可靠性、低電磁輻射、低功耗、帶寬分配、低延遲、嚴格實時同步的要求。在國際上,博通、恩智浦、寶馬等公司都開展了星載以太網相關配套產品的開發。目前部分中高端車型已經采用車載以太網進行通信,如奧迪A8采用車載以太網作為通信框架,大眾ID4采用車載以太網360°全景影像。在國內,以上海欣捷為代表的企業專注于車載以太網全棧技術的研究。自成立以來,何謙科技專注于車載以太網配套產品的開發,為汽車智能網聯、ADAS、自動駕駛、無人駕駛等功能的開發提供基于車載以太網作為骨干網絡的通信動脈。圖1是基于車輛以太網作為主干網絡的區域網關架構的示意圖。域控制器,如自動駕駛域控制器和駕駛艙域控制器,車身周圍的環境傳感器,如:車載以太網攝像頭(Eth Camera),車載以太網毫米波雷達(Eth mmWave radar),車載以太網激光雷達等。根據需要,域控制器通過車載以太網總線連接TSN網關,與中央計算平臺或環境感知傳感器交換數據。環境傳感器采集環境數據,通過車載以太網總線傳輸到相應的TSN網關進行數據交換,再由相應的TSN網關將相應的數據傳輸到中央計算平臺進行運算處理,或者由中央計算平臺通過TSN網關將數據傳輸到域控制器進行決策或者傳輸到車載以太網屏幕進行顯示。同時,TSN網關兼容CAN和CAN-FD通信,通過CAN總線和CAN-FD總線與相應的CAN ECU交換信息。
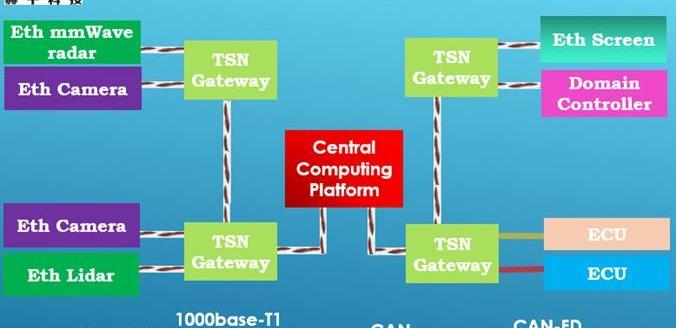
圖1基于車載以太網的區域網關架構
想想吧。如果圖1中的區域網關架構使用傳統的CAN總線、FlexRay總線或MOST總線進行通信,而不是車載以太網總線,并且如果該架構被配備L4/L5自動駕駛功能的車輛采用,則多個相機與激光雷達之間的時間同步可能不夠準確,導致圖像數據與點云數據不匹配。駕駛艙控制器顯示屏上的駕駛策略可能與揚聲器發出的提示聲不同步,或者傳感器采集傳感數據并傳輸到自動駕駛控制器的時間延遲達不到要求,所以毫無疑問L4/L5的自動駕駛車輛只停留在演示車上,無法真正實現L4/L5的自動駕駛功能。因此,車載網絡中各節點的準確時間同步對于實現L4/L5的自動駕駛功能至關重要,基于車載以太網作為骨干網絡的通信具有時間同步功能,可以滿足要求。
目前基于車載以太網的時間同步功能是基于gPTP協議的,但在實際應用中,由于異常情況等原因,時鐘同步信息消失,導致時鐘同步中斷。時鐘同步信息丟失后如何快速同步仍然是車載以太網時間同步功能需要解決的關鍵問題。為了找出星載以太網時間同步技術的改進路線,我們在國家專利數據庫中查詢了星載以太網時間同步技術的相關專利。通過查詢,我們了解到韓國現代汽車有限公司申請了更多的r……國際上星載以太網的時間同步。在國內,高校和科研院所,同濟大學申請了車載以太網時間同步專利。在企業中,HingeTech擁有的車載以太網時間同步授權專利較多。更有意思的是,我們看了上海何謙電子科技有限公司時間同步專利的相關專利,剛剛發現其中有一項專利號為201911214729.8,是一項應用于主鐘和從鐘的時間同步校正方法和裝置的專利。該專利為基于gPTP協議的時鐘同步信息丟失后如何快速同步提供了可行的解決方案。具體要點如下:
從時鐘接收到主時鐘發送的同步時間報文后,計算主時鐘和從時鐘之間的時鐘偏移,通過時鐘偏移修正從時鐘的時鐘偏移,而不修正從時鐘的時鐘頻率;只有在指定時間后,時鐘偏移和時鐘頻率偏移才能同步校正。
以預設調頻時間為起始位置,跟蹤預設時間段內主時鐘和從時鐘之間的時鐘頻偏,預測主時鐘和從時鐘之間的時鐘頻偏趨勢;
比如根據用戶需求設置測量時長。假設從Ts_2到Ts_k的測試持續時間已經過去,主從時鐘將在測試持續時間內被校正。具體計算公式如下:

在公式(1)中,Offset_i是第I次的時鐘偏移,其中I從第2次開始計數;在公式(2)中,Offset_total是從Ts_2到ts _ k的預設時間段內所有主時鐘和從時鐘的時鐘偏移。
因此,根據公式(1)至公式(4),通過計算時鐘頻率的校正結果來校正從時鐘的時鐘頻率,使得主時鐘和從時鐘保持精確的時鐘同步。
根據HingeTech公開專利提供的實測數據,將HigPTP的時間同步校正方法與現有技術中LinuxPTP的時鐘同步校正方法進行對比,如圖2所示。結果顯示,10分鐘后,時鐘偏移從最初的31477ns變為95344 ns,相差95344 ns/10min,換算成秒為99.8nm/s。然而,當采用HigPTP方法時,10分鐘后,時鐘偏移從最初的31044ns變為23243ns。與LinuxPTP方法相比,時差縮小到7801ns/10min,換算成秒只有13nm/s,時鐘同步精度提高了8倍左右。因此,HigPTP時間同步后,主時鐘和從時鐘的時間同步精度相比現有技術有了很大的提高..
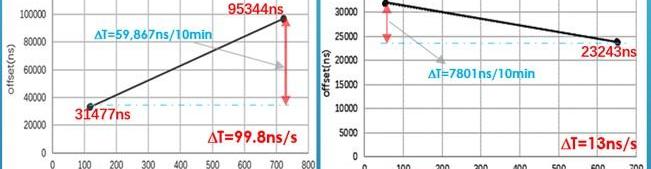
圖2何謙技術提供的HigPTP方法和現有LinuxPTP方法的主時鐘和從時鐘校正結果對比。
根據上面的介紹,我們可以知道,目前國內外很多機構和企業都還在專注于車載以太網精確時間同步技術的研究。如圖3所示,集中式區域網關架構采用車載以太網的時間同步方案。假設HiPTP方案,我們可以看到自動駕駛域控制器作為主時鐘,根據主時鐘,使用HiPTP方案同步車載以太網攝像頭和車載以太網激光雷達的時鐘,同時同步TSN網關的時鐘。由于TSN網關通過機載以太網總線與不同的域控制器相連,因此選擇TSN網關作為主時鐘,通過HigPTP實現電源域控制器、底盤域控制器、車身域控制器和駕駛艙域控制器的時鐘精確同步。通過HigPTP的時鐘同步方法,可以完成以車載以太網為骨干網的各個節點的精確時鐘同步。

圖3基于車載以太網作為骨干網的精確時鐘同步技術方案。
如果搭載L4/L5的自動駕駛車輛采用HigPTP方案,由于具有精確時間同步功能,車載以太網激光雷達和車載以太網攝像機的時鐘可以精確同步,從而實現點云數據和影像數據的同步采集和精確匹配。可以控制傳感器收集的傳感數據傳輸到自動駕駛域控制器的延遲,駕駛艙控制器播放的提示音也能始終與屏幕上顯示的內容保持同步,那么L4/L5自動駕駛車輛就成為了真正的自動駕駛車輛。可見,車載以太網對于汽車智能聯網、ADAS、智能駕駛艙、自動駕駛等功能非常重要。可喜的是,目前國內已有何謙科技等眾多優秀的高科技企業在從事相關研究和配套產品的量產。隨著汽車智能化的不斷推進,相信在不久的將來,基于車載以太網總線的配套產品一定會在汽車智能化的浪潮中鋪開。什么是車載以太網?為什么汽車的智能網聯、自動駕駛、無人駕駛甚至智能駕駛艙的發展都離不開車載以太網?接下來,我們簡單介紹一下車載以太網。汽車以太網是一種新的局域網技術,通過以太網連接汽車中的電子單元。傳輸介質為單對非屏蔽雙絞線或光纖,傳輸速率為100 Mbit/s ~ 10 Gbit/s,同時也滿足汽車行業對高可靠性、低電磁輻射、低功耗、帶寬分配、低延遲、嚴格實時同步的要求。在國際上,博通,…XP、寶馬等公司都進行了星載以太網相關配套產品的開發。目前部分中高端車型已經采用車載以太網進行通信,如奧迪A8采用車載以太網作為通信框架,大眾ID4采用車載以太網360°全景影像。在國內,以上海欣捷為代表的企業專注于車載以太網全棧技術的研究。自成立以來,何謙科技專注于車載以太網的配套產品開發,為汽車智能網聯、ADAS、自動駕駛、無人駕駛等功能的開發提供基于車載以太網作為骨干網絡的通信動脈。圖1是基于車輛以太網作為主干網絡的區域網關架構的示意圖。域控制器,如自動駕駛域控制器和駕駛艙域控制器,車身周圍的環境傳感器,如:車載以太網攝像頭(Eth Camera),車載以太網毫米波雷達(Eth mmWave radar),車載以太網激光雷達等。根據需要,域控制器通過車載以太網總線連接TSN網關,與中央計算平臺或環境感知傳感器交換數據。環境傳感器采集環境數據,通過車載以太網總線傳輸到相應的TSN網關進行數據交換,再由相應的TSN網關將相應的數據傳輸到中央計算平臺進行運算處理,或者由中央計算平臺通過TSN網關將數據傳輸到域控制器進行決策或者傳輸到車載以太網屏幕進行顯示。同時,TSN網關兼容CAN和CAN-FD通信,通過CAN總線和CAN-FD總線與相應的CAN ECU交換信息。
圖1基于車載以太網的區域網關架構
想想吧。如果圖1中的區域網關架構使用傳統的CAN總線、FlexRay總線或MOST總線進行通信,而不是車載以太網總線,并且如果該架構被配備L4/L5自動駕駛功能的車輛采用,則多個相機與激光雷達之間的時間同步可能不夠準確,導致圖像數據與點云數據不匹配。駕駛艙控制器顯示屏上的駕駛策略可能與揚聲器發出的提示聲不同步,或者傳感器采集傳感數據并傳輸到自動駕駛控制器的時間延遲達不到要求,所以毫無疑問L4/L5的自動駕駛車輛只停留在演示車上,無法真正實現L4/L5的自動駕駛功能。因此,車載網絡中各節點的準確時間同步對于實現L4/L5的自動駕駛功能至關重要,基于車載以太網作為骨干網絡的通信具有時間同步功能,可以滿足要求。
目前基于車載以太網的時間同步功能是基于gPTP協議的,但在實際應用中,由于異常情況等原因,時鐘同步信息消失,導致時鐘同步中斷。時鐘同步信息丟失后如何快速同步仍然是車載以太網時間同步功能需要解決的關鍵問題。為了找出星載以太網時間同步技術的改進路線,我們在國家專利數據庫中查詢了星載以太網時間同步技術的相關專利。通過查詢,我們了解到韓國現代汽車公司在國際上申請了更多與車載以太網時間同步相關的專利。在國內,高校和科研院所,同濟大學申請了車載以太網時間同步專利。在企業中,HingeTech擁有的車載以太網時間同步授權專利較多。更有意思的是,我們看了上海何謙電子科技有限公司時間同步專利的相關專利,剛剛發現其中有一項專利號為201911214729.8,是一項應用于主鐘和從鐘的時間同步校正方法和裝置的專利。本專利為時鐘同步信息b……后如何快速同步提供了可行的解決方案關于gPTP協議的ed丟失。具體要點如下:
從時鐘接收到主時鐘發送的同步時間報文后,計算主時鐘和從時鐘之間的時鐘偏移,通過時鐘偏移修正從時鐘的時鐘偏移,而不修正從時鐘的時鐘頻率;只有在指定時間后,時鐘偏移和時鐘頻率偏移才能同步校正。
以預設調頻時間為起始位置,跟蹤預設時間段內主時鐘和從時鐘之間的時鐘頻偏,預測主時鐘和從時鐘之間的時鐘頻偏趨勢;
比如根據用戶需求設置測量時長。假設從Ts_2到Ts_k的測試持續時間已經過去,主從時鐘將在測試持續時間內被校正。具體計算公式如下:
在公式(1)中,Offset_i是第I次的時鐘偏移,其中I從第2次開始計數;在公式(2)中,Offset_total是從Ts_2到ts _ k的預設時間段內所有主時鐘和從時鐘的時鐘偏移。
因此,根據公式(1)至公式(4),通過計算時鐘頻率的校正結果來校正從時鐘的時鐘頻率,使得主時鐘和從時鐘保持精確的時鐘同步。
根據HingeTech公開專利提供的實測數據,將HigPTP的時間同步校正方法與現有技術中LinuxPTP的時鐘同步校正方法進行對比,如圖2所示。結果顯示,10分鐘后,時鐘偏移從最初的31477ns變為95344 ns,相差95344 ns/10min,換算成秒為99.8nm/s。然而,當采用HigPTP方法時,10分鐘后,時鐘偏移從最初的31044ns變為23243ns。與LinuxPTP方法相比,時差縮小到7801ns/10min,換算成秒只有13nm/s,時鐘同步精度提高了8倍左右。因此,HigPTP時間同步后,主時鐘和從時鐘的時間同步精度相比現有技術有了很大的提高..
圖2何謙技術提供的HigPTP方法和現有LinuxPTP方法的主時鐘和從時鐘校正結果對比。
根據上面的介紹,我們可以知道,目前國內外很多機構和企業都還在專注于車載以太網精確時間同步技術的研究。如圖3所示,集中式區域網關架構采用車載以太網的時間同步方案。假設HiPTP方案,我們可以看到自動駕駛域控制器作為主時鐘,根據主時鐘,使用HiPTP方案同步車載以太網攝像頭和車載以太網激光雷達的時鐘,同時同步TSN網關的時鐘。由于TSN網關通過機載以太網總線與不同的域控制器相連,因此選擇TSN網關作為主時鐘,通過HigPTP實現電源域控制器、底盤域控制器、車身域控制器和駕駛艙域控制器的時鐘精確同步。通過HigPTP的時鐘同步方法,可以完成以車載以太網為骨干網的各個節點的精確時鐘同步。
圖3基于車載以太網作為骨干網的精確時鐘同步技術方案。
如果搭載L4/L5的自動駕駛車輛采用HigPTP方案,由于具有精確時間同步功能,車載以太網激光雷達和車載以太網攝像機的時鐘可以精確同步,從而實現點云數據和影像數據的同步采集和精確匹配。可以控制傳感器收集的傳感數據傳輸到自動駕駛域控制器的延遲,駕駛艙控制器播放的提示音也能始終與屏幕上顯示的內容保持同步,那么L4/L5自動駕駛車輛就成為了真正的自動駕駛車輛。可見,車載以太網對于汽車智能聯網、ADAS、智能駕駛艙、自動駕駛等功能非常重要。可喜的是,目前國內已有何謙科技等眾多優秀的高科技企業在從事相關研究和配套產品的量產。隨著汽車智能化的不斷推進,相信在不久的將來,基于車載以太網總線的配套產品一定會在汽車智能化的浪潮中鋪開。
由中國科學技術協會、北京市人民政府、海南省人民政府、科學技術部、工業和信息化部、生態環境部、住房和城鄉建設部、交通運輸部、國家市場監督管理總局、國家能源局聯合主辦的第四屆世界新能源汽車大會(WNE
1900/1/1 0:00:001、極狐阿爾法ST小王子限量款2022成都車展正式上市2883萬元到35
1900/1/1 0:00:008月26日,國軒高科公布2022半年報。報告期內,公司實現營業收入人民幣8638億元,同比增長14324。歸屬于上市公司股東的凈利潤為人民幣6462萬元,同比增長3415。
1900/1/1 0:00:001、微軟首次發布汽車和移動出行整體解決方案8月28日,在2022世界新能源汽車大會上,微軟首次發布面向汽車和移動出行領域的整體解決方案,以微軟全球領先的智能云與智能邊緣技術為基礎,
1900/1/1 0:00:00日前,理想汽車發布了《理想L9參數詢價交付時間延期公告》,在公告中表示,由于四川地區限電,綿陽增程器工廠供應延遲,導致理想L9開啟交付的時間延期。
1900/1/1 0:00:00蓋世汽車訊據外媒報道,通用在8月26日宣布,該公司負責生產GMC和雪佛蘭品牌皮卡車型的墨西哥主要工廠將在次周因供應鏈問題而暫停生產。
1900/1/1 0:00:00