序言實際上很早就開始了。
汽車圖像系統是一個聽起來很高端甚至很神秘的東西,但它并沒有那么復雜。許多消費者在購車時經常詢問的“倒車影像”系統是目前常見的汽車影像產品之一。由于作者的能力,我們無法核實是哪家車廠率先添加了倒車影像,但根據我們周圍幾位專家的意見,一些大型車輛在十多年前就被添加到了類似的系統中。畢竟,車身越大,視覺死角就越多。
在那之后,倒車影像被引入小型汽車,然后我們知道倒車影像的應用越來越廣泛。甚至一些自主品牌的緊湊型車也加入了倒車影像系統,甚至有些車型直接放棄了倒車雷達,轉而使用倒車影像系統。總之,倒車影像是大多數人理解汽車影像系統的開始,但在文章的開頭,我們首先給出了什么是汽車影像技術的定義,然后談論了它們的應用和未來的發展。
定義汽車圖像
雖然從這樣一句話開始有點令人沮喪,但目前全網甚至世界上都沒有對汽車成像技術的精確定義,但筆者仍然可以在這里簡單總結一下,因此基于“光學成像系統”或“測距系統”的產品可以視為汽車成像相關產品。
也許很多人不知道測距儀本身就屬于圖像產品。
也就是說,事實上,我們最常見的圖像產品應該是倒車雷達,但測距系統在普通人眼中并不是“圖像”,而是測距和成像系統在技術原理上密切相關。從技術史上看,倒車雷達應該出現在1950年至1960年之間,并于20世紀末21世紀初在中國全面普及。
倒車雷達是目前最受歡迎的汽車圖像產品。
在那之后,成像技術進入了一個快速發展的時期。倒車影像和全景影像屬于我們傳統的認知產品,紅外夜視系統也是一個很好的延伸。至于智能大燈、車道保持、自適應巡航等,都屬于更高級別的成像產品,都具有在成像系統的基礎上添加大量“識別信息”的功能。我們稍后會在文章中詳細解釋,或者像往常一樣,讓我們先看看目前成熟的汽車成像產品有哪些。
倒車雷達原理圖
一開始,倒車影像占據了領先地位。
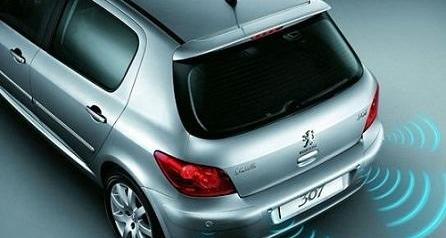
關于倒車雷達,實際上沒有什么好說的,所以我們應該從倒車圖像開始。說到倒車影像,首先要說的就是最原始的倒車影像系統。這很簡單,即將一個小攝像頭放置在汽車后部的中間,并顯示在中央控制屏幕或后視鏡的側面。這個倒車影像系統確實可以幫助我們看到汽車的后部,但仍然需要一些時間才能感覺到距離。這種倒車影像系統目前并不多見,即使是百元級別的系統也會采用增加引導線的設計。
那么連接導絲有什么困難呢?事實上,只需在輸出端添加一些修改即可實現,只需根據視角和鏡頭位置計算車身寬度,即可給出良好的左右提示。但是,這個提示仍然存在一個問題,那就是它無法與方向盤聯動,只有在直接進入倉庫時才能發揮出色的引導作用。
此時此刻,我們需要我們的引導線隨著方向盤的方向而改變,但要實現這一功能并不容易。首先,我們需要我們的汽車具有方向盤方向的實時檢測能力,然后我們需要一個特殊的端口將這些數據導出到倒車影像系統進行操作,然后我們可以將引導線與方向盤同步。因此,目前我們安裝的倒車影像一般都沒有這個功能,有些車根本無法安裝,這是沒有出路的。
進步,多角度,易于查看
好吧,既然我們可以在倒車時加入攝像頭,就不能加入其他角度嗎?當然,這是可能的。例如比亞迪S6和Acc……
第9代也有類似的設計。駕駛員可以直接看到汽車右前輪位置或右側的圖像。如果你碰巧通過一個有嚴格寬度限制的區域,這個系統可以顯示出很大的優勢,讓司機可以很容易地通過這里。
當然,一些制造商認為,既然可以添加一個和兩個,就可以全部添加,這是目前全景圖像系統的熱門產品。不同品牌和車型的全景圖像系統有不同的位置(倒車圖像基本相同),甚至有不同的概念。例如,在梅賽德斯-奔馳目前的全景圖像系統中,四個攝像頭位于兩個外后視鏡的前部中心、后部中心和下部,可以自動拼接成一個完整的汽車周邊圖像。其本質是模擬四點全向測距,這給停車帶來了極大的便利。
一些越野車也加入了全景圖像系統,但這是為了通過性。豐田普拉多增加了前輪、前側、后側和后部的盲點圖像系統,可以在路面不平的情況下觀察到非常近的前方和非常近的側面。例如,前透鏡和其他透鏡也添加了車輪方向模擬信號。如果你碰巧在有明顯坑洞的路段行駛,這個系統將非常有用。
革命引入了紅外線來觀察夜晚。
然后我們來談談夜視系統。夜視系統的基礎是紅外成像系統。在許多人看來,紅外成像比相機先進得多,但現代傳感器的傳感波長非常寬。紅外圖像傳感器和可見光傳感器之間的差異通常只是前濾色器的差異。按照目前的產業水平,制作一臺基礎夜視設備的成本不到1000元。
但是,為什么目前汽車的夜視系統仍然很少?除了法律和相關政策因素外,夜視鏡并不能帶來夜間運動的良好視野。根本原因是即使是紅外光在晚上也不那么充足。因此,汽車制造商經常在車輛前部添加紅外線燈,以補充紅外線,從而達到更好的照明效果。然而,紅外光不如紅外圖像傳感器便宜,這也是目前夜視系統的主要成本。
最后,如果考慮到以上所有因素,紅外就足夠了,屏幕可以很好地成像。還有一個差距是人類很難跨越的,那就是我們每天看到的物體都是彩色的,但紅外夜視系統是單色的,亮度比與我們每天所看到的非常不一致。如果我們只依靠這個系統來駕駛,恐怕事故是不可避免的。因此,像梅賽德斯-奔馳這樣的制造商會花費大量資金開發紅外物體識別系統,并在屏幕上給出詳細的信息提示,以確保車輛的安全,這也是目前紅外夜視系統很少使用的主要原因。
再次進入道路時的智能識別
以上所有這些都是我們可以直觀識別的汽車圖像系統。事實上,關于輔助駕駛的一些東西也是基于汽車圖像技術開發的。例如,目前在知名汽車中使用的ACC自適應巡航是基于實時測距系統(通常將超聲波與雷達相結合)來測量前一輛車與當前汽車之間的距離和速度,同時控制自己汽車的速度。當然,一些更先進的ACC自適應巡航系統將使用光學傳感器收集更多數據,以確保更好的結果。

智能識別原理圖
車道偏離預警系統和車道保持系統的基礎是光學識別。首先,攝像機以相對較高的幀速率讀取前方圖片信息,然后由處理器分析車道的方向。因為車道具有高繁茶的特征,所以可以讀取車道的方向。結合汽車本身的方向信息,我們可以得到我們是否偏離了車道,以及偏離了多少數據。這是車道偏離警告系統。如果該系統與方向控制系統相關聯,那么它就是車道保持系統。
并聯輔助系統比較簡單,但是……
它可以有效地預防低級別的交通事故。
事實上,并行輔助系統相當復雜,主要基于雷達,并且存在一些光學產品。一般來說,它依靠特定的雷達向特定的方向發送信號。只要車輛出現在相應的間隔內,就會給駕駛員一個不能并線的提示。這個功能對于一些駕駛習慣很差的朋友來說非常有用。畢竟,城市中的大多數事故都是由并線引起的,這是非常有價值的。
跳過并忘記圖像的發展
事實上,汽車圖像技術的進一步發展并沒有圖像的味道,但這離不開圖像技術的深入發展,比如智能大燈。智能大燈系統的基礎也是光學識別,有些可能會添加測距系統作為輔助。當然,智能大燈的光學系統使用亮度識別和高亮點軌跡識別來代替物體識別,并且在測距系統的輔助下,它可以很好地判斷對面車輛的位置,并決定是否打開或關閉相應的燈。
事實上,自動制動系統與自適應巡航具有相同的效果,但自動制動系統比自適應巡航稍微復雜一些。畢竟,物體在任何時候都很有可能出現在前方。如果自動制動系統過于靈敏,確實會帶來很多麻煩。因此,現在車輛的自動制動系統一般采用光學+超聲波測距的雙模,不僅需要檢測前方物體的距離,還需要光學識別前方是否有東西,否則超聲波的反射可能會導致錯誤的制動結果,追尾是不可避免的。
自動泊車系統絕對是各種成像技術的大師。
自動泊車系統也是目前許多高科技品牌關注的焦點。它可以看作是圖像技術的一個復雜的綜合應用。傳統的自動泊車系統設計不需要光學系統,只要需要超聲波測距即可。相對先進的自動泊車系統將使用光學器件作為輔助識別,可以很好地確保泊車位置足夠正,前后留出的距離適當。
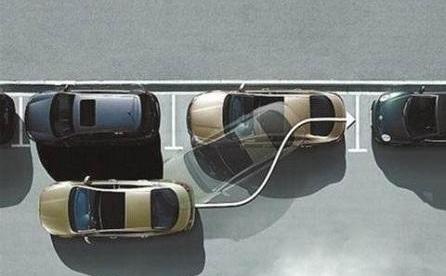
自動停車系統
如果說“如果”是高科技的,那就是梅賽德斯-奔馳最新的神奇車身控制系統,它也是基于光學識別的,但收集的信息量非常巨大。車身通過光學系統收集地面信息,然后計算前方道路的起伏,然后根據車速主動調整懸架高度。這可以說是目前圖像技術在汽車頂部最復雜的應用。
研發時間落后是一個問題。
以上是當前圖像系統的主要組成部分。一些與控制相關的功能可能很難理解,但至少有一點我們都對倒車影像系統的分辨率有著深刻的理解。雖然倒車影像已經成為主流功能,但我們經常覺得倒車影像的分辨率太低,看起來相當模糊。
從開發板到最終產品的普及,大約需要10年的時間。
但如果我們看看上游制造商目前能在多大程度上做到這一點呢?一套固定導絲、8英寸1080P屏幕的1080P魚眼相機,可將成本控制在1000元以內。然而,目前很少有倒車影像系統能達到1080P的分辨率,而且汽車的價格是六位數。顯然,成本并不是主要問題。
那么問題出在哪里呢?因為汽車是一種可以隨時工作的產品,所以零件的穩定性非常高。盡管大多數圖像產品都掛在控制系統之外,但出現問題仍然是不可原諒的。因此,目前,我們看到這些車載圖像系統非常落后,不是因為它們付不起錢,而是因為它們需要太多時間來開發和證明可靠性。
未來的自動駕駛就在這里。
上面,我們已經提到了汽車成像系統落后于整個成像系統的原因,但它將是未來整個汽車行業發展中最重要的一環。畢竟,自動駕駛技術的基礎是環境……
l檢測技術,90%的環境檢測技術依賴于成像技術。而且,視頻產品本身的價格與汽車相比非常低,所以我相信全面普及它絕非易事。

自動駕駛
要實現上圖中的自動駕駛,恐怕還有很多年的時間。
然而,汽車成像技術仍然面臨著一個大問題,那就是信息量過大。盡管只需增加更多的傳感器就可以實現對周圍環境的采集,但即使采集到非常大量的環境條件,對這一環節的分析和處理仍然是不可避免的。物體識別算法已經成為最重要的因素,運算單元的理論能力也是一個非常重要的因素。目前,汽車仍在使用ARM低功耗處理器Terga,處理大量高分辨率、高采樣的視頻流信息顯然極其困難。
汽車成像技術必須是汽車制造商未來進步的重點,而上述高科技功能也將是衡量汽車科技含量的重要指標。當然,除了成像技術和互聯網的應用,電驅動技術也將成為未來汽車發展的中堅力量。我們不知道未來會發生什么。我們現在能做的就是期待它。讓我們期待它!
序言實際上很早就開始了。
汽車圖像系統是一個聽起來很高端甚至很神秘的東西,但它并沒有那么復雜。許多消費者在購車時經常詢問的“倒車影像”系統是目前常見的汽車影像產品之一。由于作者的能力,我們無法核實是哪家車廠率先添加了倒車影像,但根據我們周圍幾位專家的意見,一些大型車輛在十多年前就被添加到了類似的系統中。畢竟,車身越大,視覺死角就越多。
在那之后,倒車影像被引入小型汽車,然后我們知道倒車影像的應用越來越廣泛。甚至一些自主品牌的緊湊型車也加入了倒車影像系統,甚至有些車型直接放棄了倒車雷達,轉而使用倒車影像系統。總之,倒車影像是大多數人理解汽車影像系統的開始,但在文章的開頭,我們首先給出了什么是汽車影像技術的定義,然后談論了它們的應用和未來的發展。
定義汽車圖像
雖然從這樣一句話開始有點令人沮喪,但目前全網甚至世界上都沒有對汽車成像技術的精確定義,但筆者仍然可以在這里簡單總結一下,因此基于“光學成像系統”或“測距系統”的產品可以視為汽車成像相關產品。
也許很多人不知道測距儀本身就屬于圖像產品。
也就是說,事實上,我們最常見的圖像產品應該是倒車雷達,但測距系統在普通人眼中并不是“圖像”,而是測距和成像系統在技術原理上密切相關。從技術史上看,倒車雷達應該出現在1950年至1960年之間,并于20世紀末21世紀初在中國全面普及。
倒車雷達是目前最受歡迎的汽車圖像產品。
在那之后,成像技術進入了一個快速發展的時期。倒車影像和全景影像屬于我們傳統的認知產品,紅外夜視系統也是一個很好的延伸。至于智能大燈、車道保持、自適應巡航等,都屬于更高級別的成像產品,都具有在成像系統的基礎上添加大量“識別信息”的功能。我們稍后會在文章中詳細解釋,或者像往常一樣,讓我們先看看目前成熟的汽車成像產品有哪些。
倒車雷達原理圖
一開始,倒車影像占據了領先地位。
關于倒車雷達,實際上沒有什么好說的,所以我們應該從倒車圖像開始。說到倒車影像,首先要說的就是最原始的倒車影像系統。這很簡單,即將一個小攝像頭放置在汽車后部的中間,并顯示在中央控制屏幕或后視鏡的側面。這個倒車影像系統確實可以幫助我們看到汽車的后部,但仍然需要一些時間才能感覺到距離。這種倒車影像系統目前并不多見,即使是百元級別的系統也會采用增加引導線的設計。
那么連接導絲有什么困難呢?事實上,只需在輸出端添加一些修改即可實現,只需根據視角和鏡頭位置計算車身寬度,即可給出良好的左右提示。但是,這個提示仍然存在一個問題,那就是它無法與方向盤聯動,只有在直接進入倉庫時才能發揮出色的引導作用。
此時此刻,我們需要我們的引導線隨著方向盤的方向而改變,但要實現這一功能并不容易。首先,我們需要我們的汽車具有方向盤方向的實時檢測能力,然后我們需要一個特殊的端口將這些數據導出到倒車影像系統進行操作,然后我們可以將引導線與方向盤同步。因此,目前我們安裝的倒車影像一般都沒有這個功能,有些車根本無法安裝,這是沒有出路的。
進步,多角度,易于查看
好吧,既然我們可以在倒車時加入攝像頭,就不能加入其他角度嗎?當然,這是可能的。例如比亞迪S6和Ac……
rd第9代也有類似的設計。駕駛員可以直接看到汽車右前輪位置或右側的圖像。如果你碰巧通過一個有嚴格寬度限制的區域,這個系統可以顯示出很大的優勢,讓司機可以很容易地通過這里。
當然,一些制造商認為,既然可以添加一個和兩個,就可以全部添加,這是目前全景圖像系統的熱門產品。不同品牌和車型的全景圖像系統有不同的位置(倒車圖像基本相同),甚至有不同的概念。例如,在梅賽德斯-奔馳目前的全景圖像系統中,四個攝像頭位于兩個外后視鏡的前部中心、后部中心和下部,可以自動拼接成一個完整的汽車周邊圖像。其本質是模擬四點全向測距,這給停車帶來了極大的便利。
一些越野車也加入了全景圖像系統,但這是為了通過性。豐田普拉多增加了前輪、前側、后側和后部的盲點圖像系統,可以在路面不平的情況下觀察到非常近的前方和非常近的側面。例如,前透鏡和其他透鏡也添加了車輪方向模擬信號。如果你碰巧在有明顯坑洞的路段行駛,這個系統將非常有用。
革命引入了紅外線來觀察夜晚。
然后我們來談談夜視系統。夜視系統的基礎是紅外成像系統。在許多人看來,紅外成像比相機先進得多,但現代傳感器的傳感波長非常寬。紅外圖像傳感器和可見光傳感器之間的差異通常只是前濾色器的差異。按照目前的產業水平,制作一臺基礎夜視設備的成本不到1000元。
但是,為什么目前汽車的夜視系統仍然很少?除了法律和相關政策因素外,夜視鏡并不能帶來夜間運動的良好視野。根本原因是即使是紅外光在晚上也不那么充足。因此,汽車制造商經常在車輛前部添加紅外線燈,以補充紅外線,從而達到更好的照明效果。然而,紅外光不如紅外圖像傳感器便宜,這也是目前夜視系統的主要成本。
最后,如果考慮到以上所有因素,紅外就足夠了,屏幕可以很好地成像。還有一個差距是人類很難跨越的,那就是我們每天看到的物體都是彩色的,但紅外夜視系統是單色的,亮度比與我們每天所看到的非常不一致。如果我們只依靠這個系統來駕駛,恐怕事故是不可避免的。因此,像梅賽德斯-奔馳這樣的制造商會花費大量資金開發紅外物體識別系統,并在屏幕上給出詳細的信息提示,以確保車輛的安全,這也是目前紅外夜視系統很少使用的主要原因。
再次進入道路時的智能識別
以上所有這些都是我們可以直觀識別的汽車圖像系統。事實上,關于輔助駕駛的一些東西也是基于汽車圖像技術開發的。例如,目前在知名汽車中使用的ACC自適應巡航是基于實時測距系統(通常將超聲波與雷達相結合)來測量前一輛車與當前汽車之間的距離和速度,同時控制自己汽車的速度。當然,一些更先進的ACC自適應巡航系統將使用光學傳感器收集更多數據,以確保更好的結果。
智能識別原理圖
車道偏離預警系統和車道保持系統的基礎是光學識別。首先,攝像機以相對較高的幀速率讀取前方圖片信息,然后由處理器分析車道的方向。因為車道具有高繁茶的特征,所以可以讀取車道的方向。結合汽車本身的方向信息,我們可以得到我們是否偏離了車道,以及偏離了多少數據。這是車道偏離警告系統。如果該系統與方向控制系統相關聯,那么它就是車道保持系統。
并聯輔助系統比較簡單,b……
它可以有效地預防低級別的交通事故。
事實上,并行輔助系統相當復雜,主要基于雷達,并且存在一些光學產品。一般來說,它依靠特定的雷達向特定的方向發送信號。只要車輛出現在相應的間隔內,就會給駕駛員一個不能并線的提示。這個功能對于一些駕駛習慣很差的朋友來說非常有用。畢竟,城市中的大多數事故都是由并線引起的,這是非常有價值的。
跳過并忘記圖像的發展
事實上,汽車圖像技術的進一步發展并沒有圖像的味道,但這離不開圖像技術的深入發展,比如智能大燈。智能大燈系統的基礎也是光學識別,有些可能會添加測距系統作為輔助。當然,智能大燈的光學系統使用亮度識別和高亮點軌跡識別來代替物體識別,并且在測距系統的輔助下,它可以很好地判斷對面車輛的位置,并決定是否打開或關閉相應的燈。
事實上,自動制動系統與自適應巡航具有相同的效果,但自動制動系統比自適應巡航稍微復雜一些。畢竟,物體在任何時候都很有可能出現在前方。如果自動制動系統過于靈敏,確實會帶來很多麻煩。因此,現在車輛的自動制動系統一般采用光學+超聲波測距的雙模,不僅需要檢測前方物體的距離,還需要光學識別前方是否有東西,否則超聲波的反射可能會導致錯誤的制動結果,追尾是不可避免的。
自動泊車系統絕對是各種成像技術的大師。
自動泊車系統也是目前許多高科技品牌關注的焦點。它可以看作是圖像技術的一個復雜的綜合應用。傳統的自動泊車系統設計不需要光學系統,只要需要超聲波測距即可。相對先進的自動泊車系統將使用光學器件作為輔助識別,可以很好地確保泊車位置足夠正,前后留出的距離適當。
自動停車系統
如果說“如果”是高科技的,那就是梅賽德斯-奔馳最新的神奇車身控制系統,它也是基于光學識別的,但收集的信息量非常巨大。車身通過光學系統收集地面信息,然后計算前方道路的起伏,然后根據車速主動調整懸架高度。這可以說是目前圖像技術在汽車頂部最復雜的應用。
研發時間落后是一個問題。
以上是當前圖像系統的主要組成部分。一些與控制相關的功能可能很難理解,但至少有一點我們都對倒車影像系統的分辨率有著深刻的理解。雖然倒車影像已經成為主流功能,但我們經常覺得倒車影像的分辨率太低,看起來相當模糊。
從開發板到最終產品的普及,大約需要10年的時間。
但如果我們看看上游制造商目前能在多大程度上做到這一點呢?一套固定導絲、8英寸1080P屏幕的1080P魚眼相機,可將成本控制在1000元以內。然而,目前很少有倒車影像系統能達到1080P的分辨率,而且汽車的價格是六位數。顯然,成本并不是主要問題。
那么問題出在哪里呢?因為汽車是一種可以隨時工作的產品,所以零件的穩定性非常高。盡管大多數圖像產品都掛在控制系統之外,但出現問題仍然是不可原諒的。因此,目前,我們看到這些車載圖像系統非常落后,不是因為它們付不起錢,而是因為它們需要太多時間來開發和證明可靠性。
未來的自動駕駛就在這里。
上面,我們已經提到了汽車成像系統落后于整個成像系統的原因,但它將是未來整個汽車行業發展中最重要的一環。畢竟,自動駕駛技術的基礎是環境……
al檢測技術,90%的環境檢測技術依賴于成像技術。而且,視頻產品本身的價格與汽車相比非常低,所以我相信全面普及它絕非易事。
自動駕駛
要實現上圖中的自動駕駛,恐怕還有很多年的時間。
然而,汽車成像技術仍然面臨著一個大問題,那就是信息量過大。盡管只需增加更多的傳感器就可以實現對周圍環境的采集,但即使采集到非常大量的環境條件,對這一環節的分析和處理仍然是不可避免的。物體識別算法已經成為最重要的因素,運算單元的理論能力也是一個非常重要的因素。目前,汽車仍在使用ARM低功耗處理器Terga,處理大量高分辨率、高采樣的視頻流信息顯然極其困難。
汽車成像技術必須是汽車制造商未來進步的重點,而上述高科技功能也將是衡量汽車科技含量的重要指標。當然,除了成像技術和互聯網的應用,電驅動技術也將成為未來汽車發展的中堅力量。我們不知道未來會發生什么。我們現在能做的就是期待它。讓我們期待它!
4月8日至10日,河南省委副書記、省長謝伏瞻率領2014年重點項目暨產業集聚區建設觀摩點評活動第二組成員,深入安陽、濮陽、鶴壁、新鄉、焦作5市觀摩考察。
1900/1/1 0:00:00豐田汽車、本田、日產汽車及三菱汽車4大車商計劃在5月底共同出資成立新公司,以推動電動汽車EV及插電式混合動力車PHV的充電基礎設施建設。4家公司此舉旨在加快EV和PHV的普及工作。
1900/1/1 0:00:00為實現純電動汽車在京津兩地無障礙運行,天津市東麗和徐官屯高速公路服務區的充換電站日前已開工建設。
1900/1/1 0:00:00第一電動網(作者胡笑菲)關于特斯拉ModelS在中國的交車日期一傳再傳,4月11日,作者致電特斯拉銷售獲悉,中國最早的一批ModelS預定客戶將會在4月底拿到車,
1900/1/1 0:00:00純電動汽車享受的政策扶持“特權”或將被打破。
1900/1/1 0:00:004月11日,“自律創新促發展小型純電動汽車創新論壇”在位于山東淄博的唐駿汽車集團舉行。
1900/1/1 0:00:00