提到Mobileye,大多數人的第一反應是基于視覺方案的ADAS,以及自動駕駛方案的芯片和算法供應商。在被英特爾收購后,雙方的聯盟也成為了自動駕駛領域的一大陣營。事實上,除了視覺相關技術,Mobileye還希望通過其他方式讓自動駕駛變得更安全、更快。他們開發了一個名為RSS(責任敏感安全模型)的系統,希望通過建立數學公式,使自動駕駛汽車能夠判斷自己的安全狀態,從而盡可能避免事故的發生。在IEEE智能汽車大會上,GeekCar與英特爾無人駕駛解決方案的首席工程師兼首席系統架構師Jack Weast聊了聊。從他那里,我還了解到了英特爾和Mobileye的RSS模型的一些詳細信息。什么是RSS模型?要理解RSS模型的使用,我們必須首先了解它是什么。從本質上講,RSS模型是一組數學公式,它將人類對安全駕駛的概念和概念轉化為數學公式和計算方法,以定義什么樣的駕駛行為是安全駕駛。Jack Weast告訴我,他們認為盡管人類駕駛存在很多問題,但他們潛意識里有很強的安全感。例如,開車時與前車保持安全距離,并線時留出足夠的空間,有人堵車時減速。這種安全意識是人的本能,非常有效,基本上可以保證各種駕駛情況下的安全。
因此,RSS模型希望將這種本能轉變為一套嚴謹的公式算法,引導人工智能的決策算法在特定場景下做出合理、安全的判斷。在定義RSS模型時,必須遵守兩個原則:1。自動駕駛汽車不得因自身原因造成碰撞或事故;2.當其他車輛存在潛在風險并可能引發交通事故時,自動駕駛汽車應如何采取適當措施避免可能發生的交通事故?
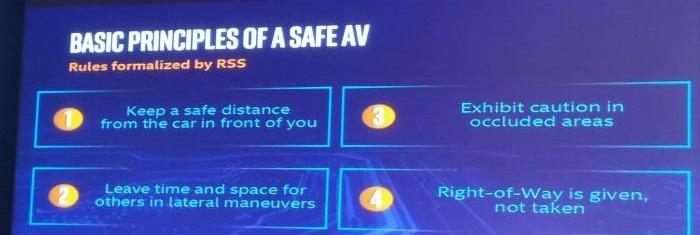
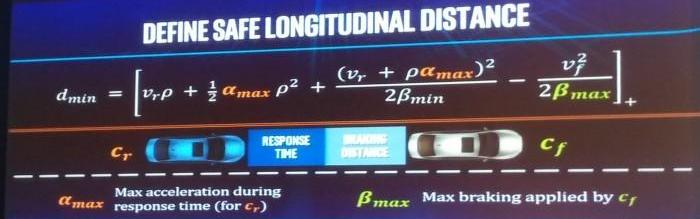
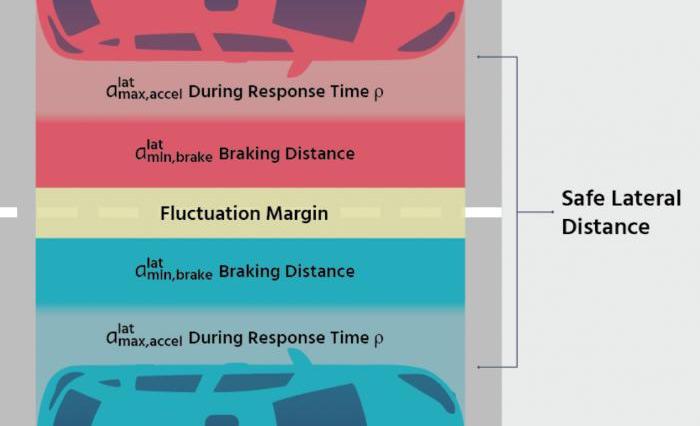
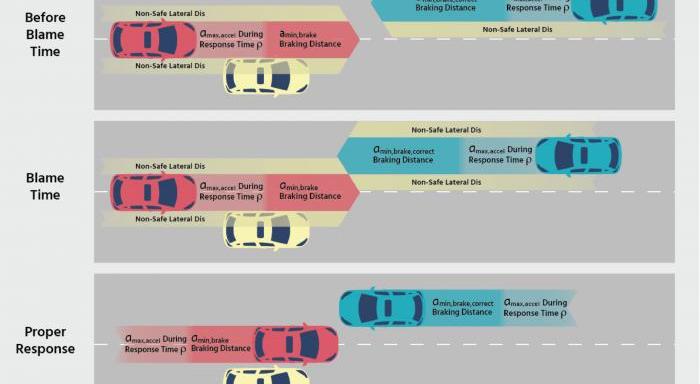
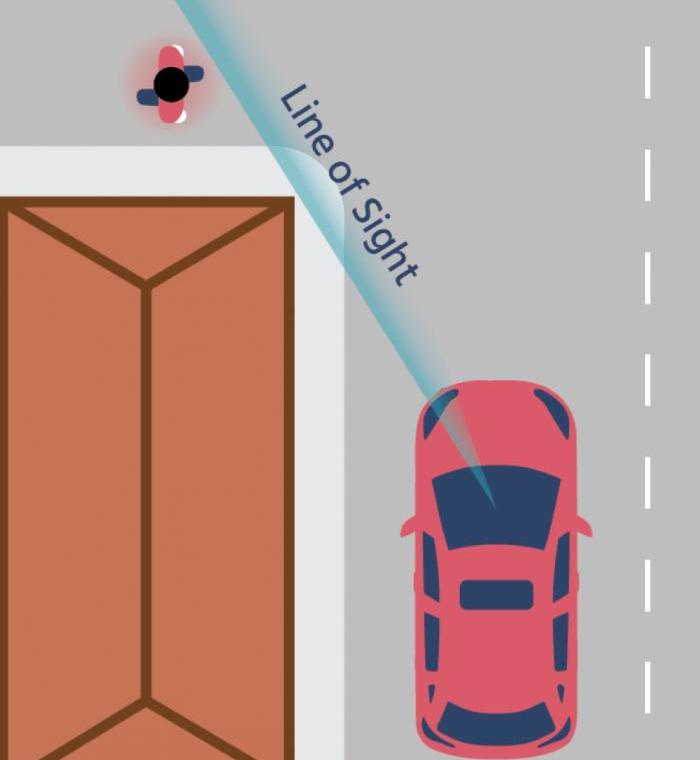
當模型實際建立時,RSS模型采用了四個正式規則,以確保車輛在自動駕駛狀態下的安全,避免成為事故的一方:1。與前方車輛保持安全距離;2.給旁邊的人或車留出足夠的反應時間和空間;3.在交通堵塞時要更加小心;4、合理使用路權(路權的使用應以安全為主)。不久前,在Mobileye發布的一份官方報告中,他們列舉了37種可能的事故場景,包括平行車之間的安全距離、平行線之間的安全間距、避免追尾的最小安全距離,以及行人闖入路邊高速公路時的安全速度。根據官方數據,這37種情況基本涵蓋了99.4%的車禍可能性,這也表明RSS模型已經達到了相當健全和可用的狀態。當然,RSS模型肯定沒有涵蓋所有意想不到的可能性,它需要英特爾和Mobileye不斷改進。以下是一些官方列出的場景:
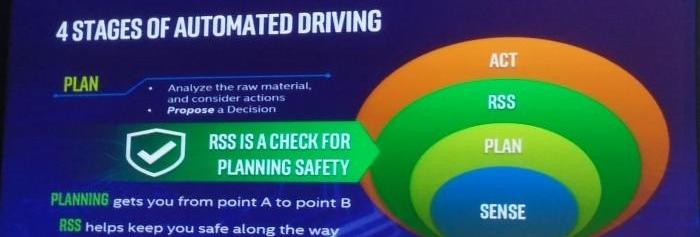
RSS模型的意義是什么?要理解這個問題,我們必須首先理解RSS模型和自動駕駛系統之間的關系。一般來說,自動駕駛可以分為三個步驟:感知決策執行。其中,感知主要取決于包括身體傳感器和高精度地圖在內的部分。在決策層面,它更多地依靠一組人工智能訓練的算法來判斷車輛在當前情況下應該如何反應;
最后,通過車身的電子部件實現相應的操作,包括控制轉向、制動、加速等動作。當Mobileye創建RSS模型時,它將RSS定位在決策之后和實現之前。
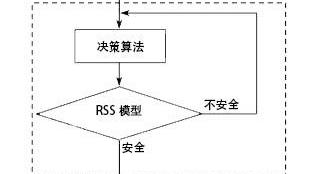
Jack Weast告訴我,RSS模型的本質是一套科學的算法。在車輛本身通過AI算法做出判斷后,該指令被輸入到RSS模型中,以驗證相應的結果。用他的話來說,RSS模型是決策算法的“安全印章”。例如,如果決策算法在某種狀態下做出制動的判斷,那么這個判斷將被輸入RSS模型,以了解制動操作在當前情況下是否能確保車輛的安全。如果結果顯示它是安全的,那么這個命令將直接執行;
如果結果顯示有危險,RSS模型將此指令返回給決策算法,并進行第二次決策,直到獲得最安全的結果。用下圖簡要說明RSS模型、決策算法和執行之間的關系:
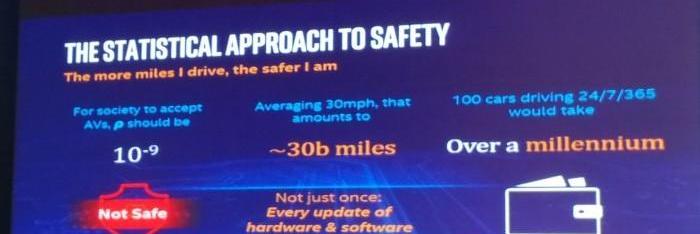
因為決策算法可以通過不斷學習各種情況來判斷各種場景下的相應決策,所以本質上是一個概率問題。因此,人工智能算法無法100%保證決策的安全性,尤其是在路況、車輛性能、傳感器配置等各種外部因素的影響下,現階段很容易做出錯誤的判斷。此外,Jack Weast在演講中也談到了這些數據。目前,人類駕駛的事故概率為10-6,無人駕駛的事故率必須達到10-9,也就是說,航空業目前的安全水平將得到外界的廣泛認可。為了達到這種安全水平,訓練算法大約需要30億英里。目前,數據量最大的谷歌的累計里程數為100萬,與數據量相去甚遠。因此,這種方式極大地限制了自動駕駛的發展速度。
在此前提下,RSS模型的介入具有重要意義。RSS模型屬于嚴格的數學算法。通過在特定情況下控制道路限速、車速、距離、天氣等各種可能的變量,可以得出明確的結論,指導人工智能算法像真人一樣做出安全判斷。根據官方數據,僅憑10-5左右的自動駕駛里程數據,RSS車型的事故率就可以保證在10-9。從這個角度來看,RSS模型對于自動駕駛的普及具有重要意義。開放是關鍵。在采訪中,我和Jack Weast強調,RSS模式是一個開放的系統,希望能幫助自動駕駛的所有參與者,讓整個行業快速發展。他們不會限制RSS模型應用的軟硬件解決方案,因為他們是自動駕駛解決方案的供應商之一。事實上,行業的快速落地也將使英特爾和Mobileye更快地在自動駕駛領域建立商業模式,這也是他們大力推廣RSS模式的原因之一。為了讓更多的參與者能夠使用RSS模型,Intel和Mobileye選擇開放RSS模型,以提供一個透明的框架,讓任何參與者都能直觀地看到RSS模型的原理和效果。這樣可以最大限度地減少原始設備制造商、自動駕駛公司和監管部門等參與者的疑慮。我們可以看到英特爾和Mobileye的努力,但其背后的挑戰仍然存在。RSS模型建立之初,希望能成為全球通用的自動駕駛驗證模型,加速行業落地。從歷史上看,英特爾在USB和PCI協議的制定方面做過類似于開源的事情。然而,考慮到自動駕駛在很大程度上受到車輛性能配置、傳感器能力和路況等一些可控和不可控因素的影響,開源模型需要面臨更大的挑戰。當更多的人使用這種模式時,這意味著更大的責任和更高的安全要求。此外,自動駕駛行業仍處于起步階段,每個人對數據的敏感度仍然很高。如何獲得信任仍然是一個巨大的挑戰。Jack Weast表示,RSS模式需要與每個地區的原始設備制造商、自動駕駛公司和政策制定者合作,以滿足特定地區不同法規和駕駛習慣的安全要求,從而建立更嚴格的安全模式。目前,他們已經通過建立自己的車隊,逐步完善了RSS模式。在國內,他們也在通過寶馬車型進行測試。簡而言之,自動駕駛的應用絕對是一個復雜而艱巨的過程。作為一名消費者,我很高興看到這種可以加速自動駕駛落地的技術得到了開發和應用。提到Mobileye,大多數人的第一反應是基于視覺方案的ADAS,以及自動駕駛方案的芯片和算法供應商。在被英特爾收購后,雙方的聯盟也成為了汽車領域的一大陣營……
超速駕駛。事實上,除了視覺相關技術,Mobileye還希望通過其他方式讓自動駕駛變得更安全、更快。他們開發了一個名為RSS(責任敏感安全模型)的系統,希望通過建立數學公式,使自動駕駛汽車能夠判斷自己的安全狀態,從而盡可能避免事故的發生。在IEEE智能汽車大會上,GeekCar與英特爾無人駕駛解決方案的首席工程師兼首席系統架構師Jack Weast聊了聊。從他那里,我還了解到了英特爾和Mobileye的RSS模型的一些詳細信息。什么是RSS模型?要理解RSS模型的使用,我們必須首先了解它是什么。從本質上講,RSS模型是一組數學公式,它將人類對安全駕駛的概念和概念轉化為數學公式和計算方法,以定義什么樣的駕駛行為是安全駕駛。Jack Weast告訴我,他們認為盡管人類駕駛存在很多問題,但他們潛意識里有很強的安全感。例如,開車時與前車保持安全距離,并線時留出足夠的空間,有人堵車時減速。這種安全意識是人的本能,非常有效,基本上可以保證各種駕駛情況下的安全。
因此,RSS模型希望將這種本能轉變為一套嚴謹的公式算法,引導人工智能的決策算法在特定場景下做出合理、安全的判斷。在定義RSS模型時,必須遵守兩個原則:1。自動駕駛汽車不得因自身原因造成碰撞或事故;2.當其他車輛存在潛在風險并可能引發交通事故時,自動駕駛汽車應如何采取適當措施避免可能發生的交通事故?
當模型實際建立時,RSS模型采用了四個正式規則,以確保車輛在自動駕駛狀態下的安全,避免成為事故的一方:1。與前方車輛保持安全距離;2.給旁邊的人或車留出足夠的反應時間和空間;3.在交通堵塞時要更加小心;4、合理使用路權(路權的使用應以安全為主)。不久前,在Mobileye發布的一份官方報告中,他們列舉了37種可能的事故場景,包括平行車之間的安全距離、平行線之間的安全間距、避免追尾的最小安全距離,以及行人闖入路邊高速公路時的安全速度。根據官方數據,這37種情況基本涵蓋了99.4%的車禍可能性,這也表明RSS模型已經達到了相當健全和可用的狀態。當然,RSS模型肯定沒有涵蓋所有意想不到的可能性,它需要英特爾和Mobileye不斷改進。以下是一些官方列出的場景:
RSS模型的意義是什么?要理解這個問題,我們必須首先理解RSS模型和自動駕駛系統之間的關系。一般來說,自動駕駛可以分為三個步驟:感知決策執行。其中,感知主要取決于包括身體傳感器和高精度地圖在內的部分。在決策層面,它更多地依靠一組人工智能訓練的算法來判斷車輛在當前情況下應該如何反應;
最后,通過車身的電子部件實現相應的操作,包括控制轉向、制動、加速等動作。當Mobileye創建RSS模型時,它將RSS定位在決策之后和實現之前。
Jack Weast告訴我,RSS模型的本質是一套科學的算法。在車輛本身通過AI算法做出判斷后,該指令被輸入到RSS模型中,以驗證相應的結果。用他的話來說,RSS模型是決策算法的“安全印章”。例如,如果決策算法在某種狀態下做出制動的判斷,那么這個判斷將被輸入RSS模型,以了解制動操作在當前情況下是否能確保車輛的安全。如果結果顯示它是安全的,那么這個命令將直接執行;
如果結果顯示有危險,RSS模型將此指令返回給決策算法,并進行第二次決策,直到獲得最安全的結果。用下圖簡要說明RSS模型、決策算法和執行之間的關系:
因為決策算法可以通過不斷學習各種情況來判斷各種場景下的相應決策,所以本質上是一個概率問題。因此,人工智能算法無法100%保證決策的安全性,尤其是在路況、車輛性能、傳感器配置等各種外部因素的影響下,現階段很容易做出錯誤的判斷。此外,Jack Weast在演講中也談到了這些數據。目前,人類駕駛的事故概率為10-6,無人駕駛的事故率必須達到10-9,也就是說,航空業目前的安全水平將得到外界的廣泛認可。為了達到這種安全水平,訓練算法大約需要30億英里。目前,數據量最大的谷歌的累計里程數為100萬,與數據量相去甚遠。因此,這種方式極大地限制了自動駕駛的發展速度。
在此前提下,RSS模型的介入具有重要意義。RSS模型屬于嚴格的數學算法。通過在特定情況下控制道路限速、車速、距離、天氣等各種可能的變量,可以得出明確的結論,指導人工智能算法像真人一樣做出安全判斷。根據官方數據,僅憑10-5左右的自動駕駛里程數據,RSS車型的事故率就可以保證在10-9。從這個角度來看,RSS模型對于自動駕駛的普及具有重要意義。開放是關鍵。在采訪中,我和Jack Weast強調,RSS模式是一個開放的系統,希望能幫助自動駕駛的所有參與者,讓整個行業快速發展。他們不會限制RSS模型應用的軟硬件解決方案,因為他們是自動駕駛解決方案的供應商之一。事實上,行業的快速落地也將使英特爾和Mobileye更快地在自動駕駛領域建立商業模式,這也是他們大力推廣RSS模式的原因之一。為了讓更多的參與者能夠使用RSS模型,Intel和Mobileye選擇開放RSS模型,以提供一個透明的框架,讓任何參與者都能直觀地看到RSS模型的原理和效果。這樣可以最大限度地減少原始設備制造商、自動駕駛公司和監管部門等參與者的疑慮。我們可以看到英特爾和Mobileye的努力,但其背后的挑戰仍然存在。RSS模型建立之初,希望能成為全球通用的自動駕駛驗證模型,加速行業落地。從歷史上看,英特爾在USB和PCI協議的制定方面做過類似于開源的事情。然而,考慮到自動駕駛在很大程度上受到車輛性能配置、傳感器能力和路況等一些可控和不可控因素的影響,開源模型需要面臨更大的挑戰。當更多的人使用這種模式時,這意味著更大的責任和更高的安全要求。此外,自動駕駛行業仍處于起步階段,每個人對數據的敏感度仍然很高。如何獲得信任仍然是一個巨大的挑戰。Jack Weast表示,RSS模式需要與每個地區的原始設備制造商、自動駕駛公司和政策制定者合作,以滿足特定地區不同法規和駕駛習慣的安全要求,從而建立更嚴格的安全模式。目前,他們已經通過建立自己的車隊,逐步完善了RSS模式。在國內,他們也在通過寶馬車型進行測試。簡而言之,自動駕駛的應用絕對是一個復雜而艱巨的過程。作為一名消費者,我很高興看到這種可以加速自動駕駛落地的技術得到了開發和應用。
印度安得拉邦AndhraPradesh能源部正計劃在該州推廣電動汽車的使用。該部門將很快在安得拉邦州的不同城市開設50個電動汽車充電站,并準備了一份具體的行動計劃。
1900/1/1 0:00:006月12日,新的新能源政策開始實施,補貼政策提前退坡了。后來者的新能源汽車要想進入新目錄,必須滿足新的技術要求,續航里程、百公里能耗和綜合指標都提升了。
1900/1/1 0:00:00“高精地圖在自動駕駛中的作用主要有三個:第一是定位,這是整個自動駕駛里面最核心的東西;第二是決策,能夠對路況提供更多的信息;第三是導航,導航可以準確知道車的位置。
1900/1/1 0:00:00我國新能源汽車發展至今雖然在產銷量方面取得了令人矚目的成績但仍然存在著幾大痛點。其中充電問題首當其沖而充電問題就涉及到充電樁企業。
1900/1/1 0:00:002018年被稱為“造車新勢力元年”,蔚來、威馬、小鵬、奇點、前途、云度、電咖、合眾等造車新勢力的產品均計劃在2018年上市交付。
1900/1/1 0:00:007月1日,深圳沃特瑪電池有限公司放了個“勸退”假。訂單不足、資金困難、多數地區生產線停工,可以說,這家2017年國內市場份額位居第三位的頭部動力電池企業,如今基本已經“犧牲”了。
1900/1/1 0:00:00