Vector(向量)為汽車及相關行業的主機廠和供應商提供專業的開放開發平臺。Vector提供的CANoe和CANape工具可以幫助ADAS數據系統應對不同傳感器的同步傳輸、數據延遲預測、數據可視化等諸多挑戰。
向量汽車技術(上海)有限公司商業發展經理周云鵬發表了主題為“向量輔助ADAS測試與測試”的演講。以下是發言摘要:

周云鵬,威特汽車技術(上海)有限公司商務開發經理
此次分享的技術是Vector對L3自動駕駛記錄系統的理解和認識,將從以下五個方面進行:
首先明確L3自動駕駛系統的定義。第二,L3自動駕駛儀需要記錄。第三,Vector針對ADAS數據記錄系統的解決方案。第四,數據錄入后如何做數據物流。第五,如何使用記錄的數據。
L3自動駕駛系統的定義
目前L3 ADAS域控制的硬件部分基本由微控制器和微處理器組成,對應的軟件架構有經典AUTOSAR和自適應AUTOSAR。由于圖像處理和傳感器融合需要大量的計算,這對SoC提出了非常高的計算能力要求。在域控制運行過程中,會產生較大的功耗,一般采用水冷散熱的方式。在開發和調試階段,域控制器的外部接口可能包括XCP校準協議、SOME/IP、DDS等。根據不同的需求,發布的數據可能包括視頻、激光雷達點云、調試信號等。通信模式可能包括CAN、LIN總線或以太網、萬兆網絡或PCle。以上是我從數據采集的角度對ADAS域控制器的理解和認識。
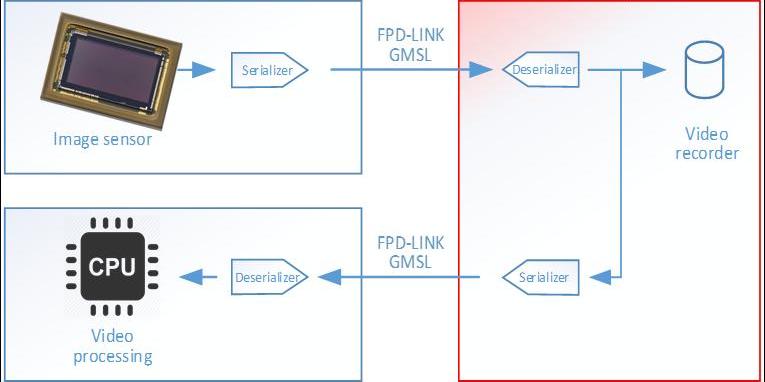
在傳感器端,比如攝像頭的圖像數據可能是5-10通道,甚至10通道以上,L2級別的像素可能是200萬或300萬,L3級別的圖像數據會提升到800萬。其數據接口包括GMSL/FPD鏈路,ISP圖像處理芯片通常置于域控制器中。有些相機可能會通過GPIO同步曝光。對于毫米波雷達,L3自動駕駛儀將配備前方雷達,角度雷達,甚至高級4D雷達。雷達提供點云、目標信息等數據,主要使用CAN或以太網接口。還有激光雷達,也是利用以太網提供原始點云信息;最后,超聲波雷達,一般采用DSI3總線協議,部分協議采用LIN。
L3的ADAS系統也將配備真相系統,該系統可能通過結合激光雷達、攝像頭和毫米波雷達來提供真相信息。它提供的數據測量接口通常是以太網接口,有自己的時域,數據同步通過PTP完成。以上是我從ADAS記錄的角度對L3系統架構的理解。
L3自動駕駛儀數據記錄系統對記錄的要求
L3系統對數據記錄有什么要求?首先是同步。同時,記錄系統需要適應不同的車型和不同傳感器的數量,記錄各種接口的數據。二是足夠的數據吞吐量,因為L3系統會適配很多傳感器和ECU,并內置CAN總線、LIN總線、以太網等接口,對應不同的數據協議,總的數據帶寬可能達到甚至超過1gbyte/s..三是滿足交互的視覺要求。在車輛測試階段,測試人員需要確認數據的準確性,以及是否可以通過可視窗口觸發功能。最后是數據物流的安全性,數據上傳到數據中心之前必須進行脫敏,可能會和云提供商或者地圖廠商做一些合作。
下一步是每個傳感器對數據記錄的不同要求。
首先是攝像頭傳感器,需要記錄原始圖像。一種采集方法是需要在攝像機和域控制器之間連接記錄系統來記錄數據。另一種是域控制器接收攝像頭傳來的視頻,然后通過LVDS接口輸出。錄制系統需要直接連接到域控制器的LVDS接口來錄制視頻。同時,由于記錄數據量大,有時必須考慮數據的無損壓縮。對于視頻帶寬,可以通過攝像頭分辨率、圖像輸出格式、幀率來計算,從而評估錄制系統應該滿足多大的帶寬吞吐量。
基本上,一個800萬像素的攝像頭一秒鐘需要300多m字節的數據,自動駕駛汽車可能會安裝5個以上甚至更多的攝像頭,總的數據帶寬會非常大。
圖片來源:矢量
另一方面,攝像頭的數據經過域控制器處理后,采用一些/IP或DDS等協議,通過以太網和PCIe輸出數據。Vector會針對這類數據做一個記錄模塊,會考慮客戶的需求,對數據進行同步和可視化。
對于毫米波雷達來說,原始數據更有助于調試拐角情況,包括來自天線的ADC數據、傅里葉變換后的FFT數據、XCP數據等等。這里需要注意的一點是,如果雷達安裝位置發生變化,OEM和Tier1要慎重考慮是否要重新做整體測試,比如重新采集一些場景信息。針對國際芯片廠商的雷達芯片,如英飛凌、恩智浦、TI等。,利用Vector VX1000的硬件支持,采集雷達的原始ADC數據和XCP數據。對于國內芯片制造商,如加特蘭德,Vector的VX1000也支持雷達原始數據的采集。
激光雷達是相對簡單的記錄系統。因為激光雷達參與域控的數據融合,所以只需要通過以太網連接激光雷達和域控回路,就可以完成數據記錄。并且確保當硬件不通電時,激光雷達和ECU也物理連接。
ADAS數據記錄系統的矢量解決方案
首先,Vector的記錄系統是硬件可擴展的,可以通過接口卡通道數的增減來適應傳感器和控制器數量的增減。如果數據帶寬大,記錄儀可以級聯,Vector的記錄平臺支持PTP時間同步,可以保證記錄儀PTP主機和各個接口卡PTP從機PTP時間同步。
然后是軟件部分,Vector通過CANape記錄數據。可以為每個傳感器制作單獨的記錄模塊-DHPR記錄器。視頻和激光雷達都是DHPR recoder記錄的,這些記錄模塊都是CANape調用的,記錄的數據可以傳回CANape顯示。有些用戶可能使用DDS傳輸數據,Vector可以為DDS開發相應的DHPR記錄儀模塊。
< img alt = " DS " src = "/ee img/{ HostI }/img/……230303181945337452/3.jpg "/>
圖片來源:矢量
Vector觀察到的一個需求是,一些用戶希望在線獲取數據。比如停車場景,用戶需要測試停車功能,在線獲取停車數據。Vector提供SL-API DLL,用戶的應用集成這個API,在線獲取記錄儀中的預定義數據。用戶也可以通過應用程序控制錄像機的啟動和停止。
以上是測量和記錄的介紹,接下來是可視化的功能。我們用的軟件是CANape,提供兩種可視化窗口:第一種是場景視圖,可以變換BEV、駕駛員視圖等不同視角。另一個是視頻窗口。軟件采集的數據,如信號、結構、目標等信息,可以通過CANape在場景和視頻窗口中顯示,對測試人員非常友好。在L3系統運行穩定的情況下,CANape log可以支持離線模式記錄,可以在沒有機載測試人員的情況下,在記錄儀上電時自動開始記錄。
數據物流
目前我們看到數據物流主要有兩種方式。一種方法是提取錄音盤,送到公司,然后拷貝到數據中心。另一種方式是用戶準備額外的物流硬盤,將硬盤提取出來插入數據復制設備,通過復印機將數據復制到物流硬盤中。復制完成后,硬盤會送到公司,上傳到云端或數據中心。當然,數據物流也可以直接使用云提供商的服務,更加方便。
目前國家對車載數據安全的要求越來越高,法律法規要求錄制的視頻需要去除個人隱私信息,尤其是人臉和車牌。Vector針對這方面開發了AI和機器學習算法,可以去除隱私信息,比如模糊車牌和人臉,或者直接生成隨機的車牌信息。
使用記錄的數據
最后,Vector思考如何使用數據。矢量視頻回放方案:1 .硬件:VP75作為硬件處理平臺,運行數據回注軟件;VX1161作為顯卡,緩存VP75發來的視頻,反饋給ECU。2.同步:VP75作為PTP的主控,同步所有視頻板和CAN或ETH板。3.軟件:CANoe負責HIL測試,stream provider負責視頻回注,CANoe通過CAPL腳本調用Stream provider實現視頻回注,其他總線回注也通過CANoe CAPL腳本實現。
(以上內容來自于2022年9月15日由Gaspar主辦的2022年第五屆自動駕駛與人機共駕論壇上,矢量汽車技術(上海)有限公司商業發展經理周云鵬發表的《矢量輔助ADAS實驗與測試》主題演講。)Vector(向量)為汽車及相關行業的主機廠和供應商提供專業的開放開發平臺。Vector提供的CANoe和CANape工具可以幫助ADAS數據系統應對不同傳感器的同步傳輸、數據延遲預測、數據可視化等諸多挑戰。
向量汽車技術(上海)有限公司商業發展經理周云鵬發表了主題為“向量輔助ADAS測試與測試”的演講。以下是發言摘要:
周云鵬,威特汽車技術(上海)有限公司商務開發經理
此次分享的技術是Vector對L3自動駕駛記錄系統的理解和認識,將從以下五個方面進行:
首先明確L3自動駕駛系統的定義。第二,L3自動駕駛儀需要記錄。第三,Vector針對ADAS數據記錄系統的解決方案。第四,數據錄入后如何做數據物流。第五,如何使用記錄的數據。
L3自動駕駛系統的定義
目前L3 ADAS域控制的硬件部分基本由微控制器和微處理器組成,對應的軟件架構有經典AUTOSAR和自適應AUTOSAR。由于圖像處理和傳感器融合需要大量的計算,這對SoC提出了非常高的計算能力要求。在域控制運行過程中,會產生較大的功耗,一般采用水冷散熱的方式。在開發和調試階段,域控制器的外部接口可能包括XCP校準協議、SOME/IP、DDS等。根據不同的需求,發布的數據可能包括視頻、激光雷達點云、調試信號等。通信模式可能包括CAN、LIN總線或以太網、萬兆網絡或PCle。以上是我從數據采集的角度對ADAS域控制器的理解和認識。
在傳感器端,比如攝像頭的圖像數據可能是5-10通道,甚至10通道以上,L2級別的像素可能是200萬或300萬,L3級別的圖像數據會提升到800萬。其數據接口包括GMSL/FPD鏈路,ISP圖像處理芯片通常置于域控制器中。有些相機可能會通過GPIO同步曝光。對于毫米波雷達,L3自動駕駛儀將配備前方雷達,角度雷達,甚至高級4D雷達。雷達提供點云、目標信息等數據,主要使用CAN或以太網接口。還有激光雷達,也是利用以太網提供原始點云信息;最后,超聲波雷達,一般采用DSI3總線協議,部分協議采用LIN。
L3的ADAS系統也將配備真相系統,該系統可能通過結合激光雷達、攝像頭和毫米波雷達來提供真相信息。它提供的數據測量接口通常是以太網接口,有自己的時域,數據同步通過PTP完成。以上是我從ADAS記錄的角度對L3系統架構的理解。
L3自動駕駛儀數據記錄系統對記錄的要求
L3系統對數據記錄有什么要求?首先是同步。同時,記錄系統需要適應不同的車型和不同傳感器的數量,記錄各種接口的數據。二是足夠的數據吞吐量,因為L3系統會適配很多傳感器和ECU,并內置CAN總線、LIN總線、以太網等接口,對應不同的數據協議,總的數據帶寬可能達到甚至超過1gbyte/s..三是滿足交互的視覺要求。在車輛測試階段,測試人員需要確認數據的準確性,以及是否可以通過可視窗口觸發功能。最后是數據物流的安全性,數據上傳到數據中心之前必須進行脫敏,可能會和云提供商或者地圖廠商做一些合作。
下一步是每個傳感器對數據記錄的不同要求。
首先是攝像頭傳感器,需要記錄原始圖像。一種采集方法是需要在攝像機和域控制器之間連接記錄系統來記錄數據。另一種是域控制器接收攝像頭傳來的視頻,然后通過LVDS接口輸出。錄制系統需要直接連接到域控制器的LVDS接口來錄制視頻。同時,由于記錄數據量大,有時必須考慮數據的無損壓縮。對于視頻帶寬,可以通過攝像頭分辨率、圖像輸出格式、幀率來計算,從而評估錄制系統應該滿足多大的帶寬吞吐量。
基本上,一個800萬像素的攝像頭一秒鐘需要300多m字節的數據,自動駕駛汽車可能會安裝5個以上甚至更多的攝像頭,總的數據帶寬會非常大。
圖片來源:矢量
另一方面,攝像頭的數據經過域控制器處理后,采用一些/IP或DDS等協議,通過以太網和PCIe輸出數據。Vector會針對這類數據做一個記錄模塊,會考慮客戶的需求,對數據進行同步和可視化。
對于毫米波雷達來說,原始數據更有助于調試拐角情況,包括來自天線的ADC數據、傅里葉變換后的FFT數據、XCP數據等等。這里需要注意的一點是,如果雷達安裝位置發生變化,OEM和Tier1要慎重考慮是否要重新做整體測試,比如重新采集一些場景信息。針對國際芯片廠商的雷達芯片,如英飛凌、恩智浦、TI等。,利用Vector VX1000的硬件支持,采集雷達的原始ADC數據和XCP數據。對于國內芯片制造商,如加特蘭德,Vector的VX1000也支持雷達原始數據的采集。
激光雷達是相對簡單的記錄系統。因為激光雷達參與域控的數據融合,所以只需要通過以太網連接激光雷達和域控回路,就可以完成數據記錄。并且確保當硬件不通電時,激光雷達和ECU也物理連接。
ADAS數據記錄系統的矢量解決方案
首先,Vector的記錄系統是硬件可擴展的,可以通過接口卡通道數的增減來適應傳感器和控制器數量的增減。如果數據帶寬大,記錄儀可以級聯,Vector的記錄平臺支持PTP時間同步,可以保證記錄儀PTP主機和各個接口卡PTP從機PTP時間同步。
然后是軟件部分,Vector通過CANape記錄數據。可以為每個傳感器制作單獨的記錄模塊-DHPR記錄器。視頻和激光雷達都是DHPR recoder記錄的,這些記錄模塊都是CANape調用的,記錄的數據可以傳回CANape顯示。有些用戶可能使用DDS傳輸數據,Vector可以為DDS開發相應的DHPR記錄儀模塊。
< img alt = " DS " src = "/ee img/{ HostI }/img/……230303181945337452/3.jpg "/>
圖片來源:矢量
Vector觀察到的一個需求是,一些用戶希望在線獲取數據。比如停車場景,用戶需要測試停車功能,在線獲取停車數據。Vector提供SL-API DLL,用戶的應用集成這個API,在線獲取記錄儀中的預定義數據。用戶也可以通過應用程序控制錄像機的啟動和停止。
以上是測量和記錄的介紹,接下來是可視化的功能。我們用的軟件是CANape,提供兩種可視化窗口:第一種是場景視圖,可以變換BEV、駕駛員視圖等不同視角。另一個是視頻窗口。軟件采集的數據,如信號、結構、目標等信息,可以通過CANape在場景和視頻窗口中顯示,對測試人員非常友好。在L3系統運行穩定的情況下,CANape log可以支持離線模式記錄,可以在沒有機載測試人員的情況下,在記錄儀上電時自動開始記錄。
數據物流
目前我們看到數據物流主要有兩種方式。一種方法是提取錄音盤,送到公司,然后拷貝到數據中心。另一種方式是用戶準備額外的物流硬盤,將硬盤提取出來插入數據復制設備,通過復印機將數據復制到物流硬盤中。復制完成后,硬盤會送到公司,上傳到云端或數據中心。當然,數據物流也可以直接使用云提供商的服務,更加方便。
目前國家對車載數據安全的要求越來越高,法律法規要求錄制的視頻需要去除個人隱私信息,尤其是人臉和車牌。Vector針對這方面開發了AI和機器學習算法,可以去除隱私信息,比如模糊車牌和人臉,或者直接生成隨機的車牌信息。
使用記錄的數據
最后,Vector思考如何使用數據。矢量視頻回放方案:1 .硬件:VP75作為硬件處理平臺,運行數據回注軟件;VX1161作為顯卡,緩存VP75發來的視頻,反饋給ECU。2.同步:VP75作為PTP的主控,同步所有視頻板和CAN或ETH板。3.軟件:CANoe負責HIL測試,stream provider負責視頻回注,CANoe通過CAPL腳本調用Stream provider實現視頻回注,其他總線回注也通過CANoe CAPL腳本實現。
(以上內容來自于2022年9月15日由Gaspar主辦的2022年第五屆自動駕駛與人機共駕論壇上,矢量汽車技術(上海)有限公司商業發展經理周云鵬發表的《矢量輔助ADAS實驗與測試》主題演講。)
標簽:DS
蓋世汽車訊9月27日,互聯、電動和自動駕駛汽車(AV)數據的云和軟件分析公司WejoGroupLimited(Wejo)宣布推出AV原型DLIVEREE,
1900/1/1 0:00:00經歷過2018、19年的生死邊緣,成功登陸資本市場的造車新勢力過上了幾年的好日子。但是,在越來越多傳統以及其他勢力推出新車的當下,原先頭部新勢力的日子又面臨了新的變數。
1900/1/1 0:00:00浙江零跑科技股份有限公司(以下簡稱“零跑科技”)于2022年9月29日正式以“9863HK”為股票代碼在港交所主板掛牌上市。
1900/1/1 0:00:00蓋世汽車訊據外媒報道,大眾汽車集團將保時捷最終的上市發行價定為每股825歐元,估值達到750億歐元。
1900/1/1 0:00:001、售價19382868萬元零跑C01正式上市9月28日,零跑C01正式上市,新車共推出5款車型,補貼后售價區間為19382868萬元。
1900/1/1 0:00:009月29日,零跑汽車正式在港交所上市,成為繼蔚小理之后,第四家上市的造車新勢力。
1900/1/1 0:00:00