出于安全考慮,自動駕駛汽車必須能夠準確跟蹤周圍行人、自行車和其他車輛的運動。現在,據國外媒體報道,卡內基梅隆大學開發了一種新方法,可以更高效地訓練這種跟蹤系統。
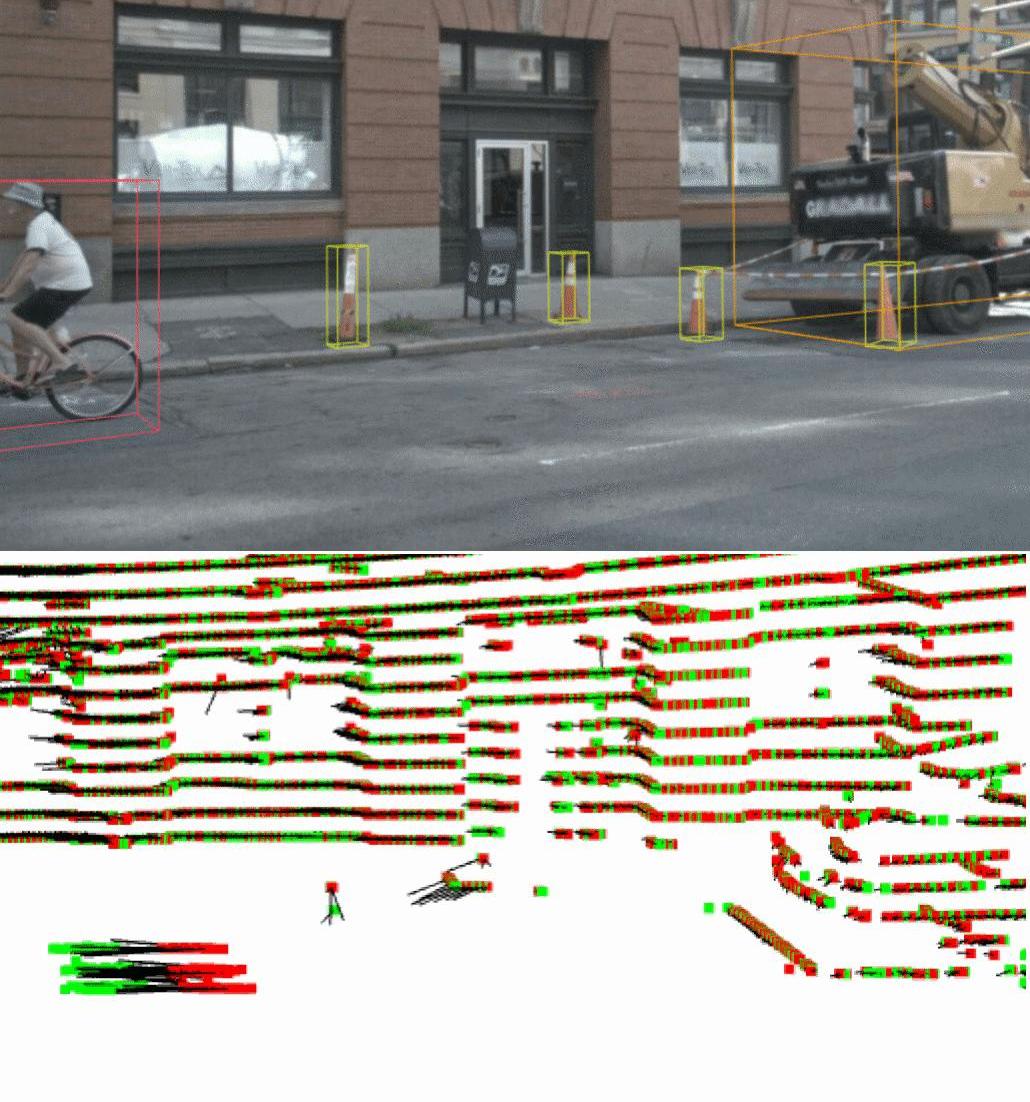
(圖片來源:卡內基梅隆大學)一般來說,使用越多的道路數據和交通數據來訓練跟蹤系統,結果會越好。為此,卡內基梅隆大學的研究人員開發了一種新方法來解鎖大量自動駕駛數據。大多數自動駕駛汽車主要依靠一種叫做激光雷達的傳感器進行導航。激光雷達是一種產生關于車輛周圍環境的3D信息的激光設備。這個3D信息不是圖像,而是點云。車輛使用一種稱為場景流的技術來理解這種數據,其中包括計算每個3D點云的速度和軌跡。一起運動的點云組被解釋為車輛、行人或其他運動物體穿過場景流。在過去,訓練這種系統的最先進的方法是使用標記數據集。這種傳感器數據已被注釋,并將隨著時間的推移跟蹤每個3D點云。而人工標注這樣的數據集既費力又費錢,所以幾乎沒有標注的數據。相反,場景流訓練通常是用模擬數據進行的,效率較低,然后會用少量標注的真實數據進行微調。卡內基梅隆大學的研究人員采用了一種不同的方法,使用未標記的數據進行場景流訓練。因為在車上安裝激光雷達,開著車到處跑,生成無標簽數據相對簡單,不會出現數據短缺的情況。這種方法的關鍵是開發一種方法,使系統能夠檢測自己在場景流中的錯誤。在每個時刻,系統都試圖預測每個3D點云的移動方向和速度。在下一個時刻,系統可以測量出預測點云位置與預測點云位置附近最近的實際位置之間的距離,這是一個誤差,需要盡可能的減小。然后,系統將反向處理,從預測的點云位置開始,向后映射點云的起始位置。因此,預測位置和實際開始位置之間的距離被測量,導致第二誤差。然后,系統會糾正這些錯誤。雖然聽起來很復雜,但研究人員發現這種方法非常有效。研究人員計算出,使用合成數據訓練集進行場景流訓練的準確率僅為25%。當使用少量真實世界標記數據對合成數據進行微調時,準確率提高到31%;當加入大量未標記數據用他們的方法訓練系統時,場景流的準確率躍升至46%。出于安全考慮,自動駕駛汽車必須能夠準確跟蹤周圍行人、自行車和其他車輛的運動。現在,據國外媒體報道,卡內基梅隆大學開發了一種新方法,可以更高效地訓練這種跟蹤系統。
(圖片來源:卡內基梅隆大學)一般來說,使用越多的道路數據和交通數據來訓練跟蹤系統,結果會越好。為此,卡內基梅隆大學的研究人員開發了一種新方法來解鎖大量自動駕駛數據。大多數自動駕駛汽車主要依靠一種叫做激光雷達的傳感器進行導航。激光雷達是一種產生關于車輛周圍環境的3D信息的激光設備。這個3D信息不是圖像,而是點云。車輛使用一種稱為場景流的技術來理解這種數據,其中包括計算每個3D點云的速度和軌跡。一起運動的點云組被解釋為車輛、行人或其他運動物體穿過場景流。在過去,訓練這種系統的最先進的方法是使用標記數據集。這種傳感器數據已被注釋,并將隨著時間的推移跟蹤每個3D點云。而人工標注這樣的數據集既費力又費錢,所以幾乎沒有標注的數據。相反,場景流訓練通常是用模擬數據進行的,效率較低,然后會用少量標注的真實數據進行微調。卡內基梅隆大學的研究人員采用了一種不同的方法,使用未標記的數據進行場景流訓練。因為在車上安裝激光雷達,開著車到處跑,生成無標簽數據相對簡單,不會出現數據短缺的情況。這種方法的關鍵是開發一種方法,使系統能夠檢測自己在場景流中的錯誤。在每個時刻,系統都試圖預測每個3D點云的移動方向和速度。在下一個時刻,系統可以測量出預測點云位置與預測點云位置附近最近的實際位置之間的距離,這是一個誤差,需要盡可能的減小。然后,系統將反向處理,從預測的點云位置開始,向后映射點云的起始位置。因此,預測位置和實際開始位置之間的距離被測量,導致第二誤差。然后,系統會糾正這些錯誤。雖然聽起來很復雜,但研究人員發現這種方法非常有效。研究人員計算出,使用合成數據訓練集進行場景流訓練的準確率僅為25%。當使用少量真實世界標記數據對合成數據進行微調時,準確率提高到31%;當加入大量未標記數據用他們的方法訓練系統時,場景流的準確率躍升至46%。
標簽:發現
據外媒INSIDEEVs消息,寶馬日前正式宣布了與Northvolt的鋰離子電池長期供應合同,價值約20億歐元,折合人民幣約159億元人民幣。
1900/1/1 0:00:007月13日,長城汽車發布關于獲得政府補助的公告。
1900/1/1 0:00:00近日,德國慕尼黑法院表示,計劃于下周就該特斯拉的自動駕駛技術是否存在誤導消費者的問題作出裁決。特斯拉曾公開表示,特斯拉汽車完全有可能實現自動駕駛,還宣傳在2019年底前具備城市道路的自動駕駛能力。
1900/1/1 0:00:00近日,據外媒報道,通用汽車決定放棄最初制定的燃料電池電池汽車計劃,即將推出的首批電動汽車,即悍馬電動汽車(GMCHummerEV)和凱迪拉克Lyriq(CadillacLyriq),
1900/1/1 0:00:00今日(7月17日),孚能科技正式在上海證券交易所科創板上市,公司證券代碼為688567,發行價格159元股,對應市值約17024億元。
1900/1/1 0:00:00據外媒報道,除了在電動汽車(EV)電池領域建立合作外,三星和現代汽車的高管們還在討論在汽車電子市場中建立合作的可能性。
1900/1/1 0:00:00