有了這個熱門話題,我們來談談車企的整體戰略方向。事實上,有一個核心問題,那就是美國、歐洲和中國一線城市未來的汽車需求是增加還是減少。前者意味著我們可以繼續增加平臺來搶占市場,而后者則需要仔細權衡是否有必要在特定車型上收縮。因此,我們可以看到,美國有三家企業選擇收縮到一定規模,日本有幾家企業考慮整合后進行調整,而德國汽車行業則選擇削減柴油和內燃機,增加對電動汽車的投資。自動駕駛的策略是一個需要考慮的關鍵話題,每種方法都可能不同。總的來說,這個熱點是Cruise Automation和Super Cruise,這是一個以自動駕駛服務為導向的高端車輛輔助駕駛系統。從自動駕駛服務和高端汽車的演變來看,我們從雙方共同努力,將其分為兩條道路。自動駕駛服務的第一部分,讓我們回收這個事務。現在看來它真的很有趣。這筆錢在當時是天價,現在整個業務的價值已經超過100億美元。

在汽車電動化、車聯網和自動駕駛的技術支持下,基于車輛共享前提下的出行即服務影響著汽車企業的未來。按照這個邏輯,前面的企業面臨的挑戰就越多。當公眾觀念發生變化,消費者習慣隨著技術進步而轉變時,企業本身無法抗拒這種變化。通用汽車也有類似的轉變。電動化、智能網聯、自動駕駛和共享服務的結合將推動未來個人出行模式的實現。該公司致力于開發先進技術,將全球資源與當地優勢相結合,積極推動汽車行業從傳統制造業向智能出行服務業轉型。

咨詢公司Navigant的一份新報告《Navigant自動駕駛領導委員會》引起了汽車行業的廣泛關注。報告對19家具有代表性的無人駕駛汽車公司進行了排名。
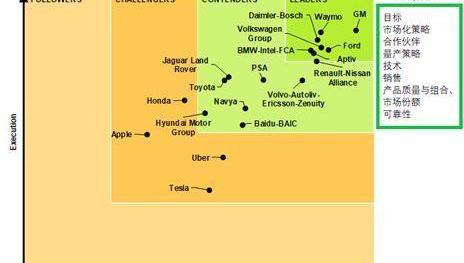
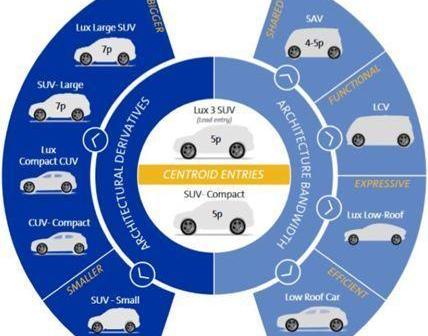
它分為四類:領導者、競爭對手、挑戰者和追隨者:領導者:通用汽車、福特汽車公司、Waymo(谷歌)、大眾汽車(以奧迪為主)、戴姆勒-博世、雷諾-日產聯盟、Ampofo(德爾福分離)、寶馬-英特爾-菲亞特克萊斯勒競爭對手:沃爾沃-奧托立夫-愛立信-智能、PSA等。豐田、現代挑戰者:優步、特斯拉,本田和蘋果通用汽車(Apple General Motors)斥資10億美元收購了舊金山一家名為Cruise Automation的小型軟件公司(致力于開發無人駕駛技術),并將利用此次收購彌補其無人駕駛技術空缺,這將幫助通用汽車在無人駕駛汽車領域贏得一席之地。通用汽車賦予Cruise首席執行官Kyle Vogt足夠的自主權和影響力,不僅可以保持原有的獨立運營機制,還可以輕松獲得汽車設計和底層架構。巡航工程師可以與通用汽車的工程師密切合作,通用汽車要求聯邦政府批準明年開始生產無方向盤或踏板的改裝Bolt。根據未來的形式,基于Bolt的開發也是暫時的狀態,最終的自動駕駛汽車將以SAV的形式出現。如下圖所示,符合要求的電動汽車是按照共享運營模式設計的,以充分發揮電動汽車和自動駕駛的優勢。
通過通用汽車發布的“2018自動駕駛安全報告”,我們梳理了通用汽車自動駕駛的一些核心安全設計注意事項。這款車基于無需駕駛員即可安全行駛的理念,在設計、開發、制造、測試和驗證的方方面面都充分考慮了安全性。自動駕駛系統從開發初期就集成到汽車中,在與軟硬件團隊的密切合作下,通用汽車已經完成了所有潛在的故障模式……
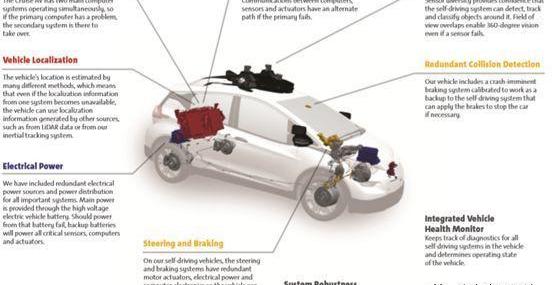
對系統進行了評估,并逐一解決了這些問題,以確保車輛的安全性和可靠性。首先,我們看到,為了實現“感應”功能,車輛的傳感器系統配備了1)五個激光雷達:激光雷達是最關鍵的,五個激光天線都布置在車頂上。2) 16個攝像頭:這些密集的攝像頭在車輛的不同位置從不同角度獲取圖像數據。這些圖像數據是激光雷達的數據補充,也是重要的傳感來源。3) 二十一個雷達:雷達是激光雷達的補充。使用毫米波雷達的數據,我們可以看到低反射率的聯合雷達:前1側2,用于檢測前方和側面的移動車輛,以及用于需要檢測更大視野中的移動的車輛的長距離雷達:前2和后2,共四個。近程雷達用于探測前后車輛和測量車輛速度:有10個近程雷達,主要用于探測車輛附近的物體,主要是行人、自行車和其他重要物體。這些傳感器數據使車輛能夠識別復雜的環境。值得一提的是,常用的傳感器可以覆蓋短程和遠程,并具有360度視角。當兩個傳感器一起使用時,速度數據不再是問題。相機也是激光雷達的補充,因為它可以測量物體發射或反射的光的強度,這樣“大腦”就可以獲得物體的更多細節。兩者結合后,車輛在做出決策時更有信心。在確定了空間和時間之后,車輛可以規劃路徑。

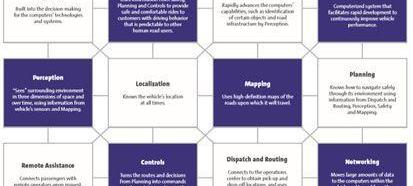
圖這輛車(第三代)配備了各種傳感傳感器系統,覆蓋了外部的360度自動駕駛計算平臺:計算“大腦”的關鍵是計算“頭腦”,計算平臺可以讓車輛掌握世界各地的情況并制定安全的駕駛計劃。單一的技術無法使“大腦”順利運轉。它是各種尖端技術的結晶,包括行為控制、機器學習、模擬、感知、定位、映射、規劃、路線分配和網絡。感知、規劃和控制是車輛在駕駛過程中感知周圍環境并做出決策的關鍵支柱。Perception使用傳感器監測周圍環境并構建3D模型。傳感器負責將信息輸入計算平臺,對物體進行算法檢測和分類,確定物體在外部環境中的位置、速度和方向規劃,將決定車輛的行為,并將參考道路交通法律法規為車輛制定正式的路徑,并找到適合自己駕駛的道路。在這個系統中,還將對可駕駛區域進行設計和分類,使自動駕駛系統不會將車輛行駛到無法控制的區域和路線。規劃過程基于外部因素,如車輛位置、其他車道上車輛的預期移動、交通管理、路標和交通法規。將對許多道路進行分析,并根據當時的情況做出最佳決策。如果出現意外情況,將在決策中采取備份計劃。Control負責執行“計劃”命令,并控制轉向系統、節氣門、制動器和動力系統的操作。控制功能基于車輛原有的車輛穩定性、牽引力和防抱死制動系統,可根據上層規劃完成實際規避動作。
通用系統安全項目融合了行業內通行的工程標準、多年的汽車制造經驗以及其他行業(航空航天、制藥和國防)的許多苛刻標準。自動駕駛汽車的多樣性、魯棒性和冗余性與航空航天相似。系統安全過程中有兩個關鍵部分,即迭代設計的安全性和集成風險控制和深度集成的安全性。兩套計算系統同時工作:重點提高系統掌握車輛完整控制的能力,包括加速、制動、轉向和決策。該計算系統具有全面的診斷和分析功能,以識別潛在……
安全風險和挑戰,并找出相應的對策。兩套電源系統:設計了兩套由高壓電池轉換而成的電源系統,并配置了額外的冗余電池供電核心傳感器。信號傳輸系統:兩套計算系統、關鍵傳感器和執行器之間的通信采用了額外的冗余碰撞執行:制動主要采用兩套執行方式,可以是前后制動器的獨立控制,以確保車輛的可控性。車輛定位:通過各種方法確定車輛的位置是核心基礎。
對于通用汽車來說,它之前花了很多錢收購了Cruiseautomation,然后配置了相應的電動汽車工程團隊進行對接,然后密歇根州獵戶座的裝配廠使用量產技術制造自動駕駛汽車。在底特律附近的裝配廠批量生產了130輛配備新一代自動駕駛技術的測試車輛,并加入了由50輛自動駕駛汽車組成的原始測試車隊,在舊金山、亞利桑那州斯科茨代爾和密歇根州底特律進行了公共道路測試。超級巡航的第二部分嚴格來說,通用汽車輔助駕駛的原始工程團隊采用了漸進的發展道路。基于之前的積累,L2級駕駛員輔助系統(超級巡航)已搭載在北美上市的2018款凱迪拉克CT6上。

備注:在其自身的系統下,當時被稱為CSAV 2,綜合安全和自適應車輛2超級巡航由三部分組成:自適應巡航系統、藍線保持系統和駕駛員注意力保持系統。1.自適應巡航系統:通過毫米波雷達監測前方車輛,確保以安全的速度行駛。這是一個全速ACC系統,工作速度為0-89英里/小時(0-144公里/小時),這意味著即使前車再次停止和啟動,Super Cruise也可以在不中斷和不手動干預的情況下跟隨車輛。2.駕駛員注意力保持系統:通過車內方向盤附近的微型攝像頭和紅外傳感器實時監測駕駛員的視線是否保持在道路上。3.藍線車道中心保持系統:前方攝像頭和兩側全景攝像頭主要用于識別左右兩側的路標,判斷車道中心位置和方向。通過高精度地圖提供的道路曲率數據、車道編號、上下匝道等道路屬性信息,利用高精度GPS進行定位,獲取道路沿線的縱向偏移距離,確定車輛所在的車道。在整合信息后,可以形成沿著車道中心的虛擬車輛控制路徑(車輛可以自動行駛)。在此過程中,需要提前與地圖供應商合作,通過激光雷達繪制高速公路地圖,為超級巡航的開通設置地理圍欄。當系統確定車輛當前處于有效區域,車輛處于車道中央,傳感器可以正常工作時,儀表板上將出現一個白色的超級巡航圖標,表明超級巡航處于待機狀態。此時,按下下方向盤上的超級巡航按鈕,功能將正式開啟,儀表板上的圖標將變為綠色,這樣駕駛員就可以用雙手和雙腳離開方向盤和油門制動器。


當使用該功能時,當系統檢測到車主被紅外分心時,或者當系統判斷外部環境超過設定閾值(車道線不清晰、GPS信號微弱等)時,系統會提示駕駛員立即接管車輛。有了這個熱門話題,我們來談談車企的整體戰略方向。事實上,有一個核心問題,那就是美國、歐洲和中國一線城市未來的汽車需求是增加還是減少。前者意味著我們可以繼續增加平臺來搶占市場,而后者則需要仔細權衡是否有必要在特定車型上收縮。因此,我們可以看到三……
美國的企業選擇收縮到一定規模,日本的幾家企業考慮整合后進行調整,而德國汽車行業則選擇削減柴油和內燃機,增加對電動汽車的投資。自動駕駛的策略是一個需要考慮的關鍵話題,每種方法都可能不同。總的來說,這個熱點是Cruise Automation和Super Cruise,這是一個以自動駕駛服務為導向的高端車輛輔助駕駛系統。從自動駕駛服務和高端汽車的演變來看,我們從雙方共同努力,將其分為兩條道路。自動駕駛服務的第一部分,讓我們回收這個事務。現在看來它真的很有趣。這筆錢在當時是天價,現在整個業務的價值已經超過100億美元。
在汽車電動化、車聯網和自動駕駛的技術支持下,基于車輛共享前提下的出行即服務影響著汽車企業的未來。按照這個邏輯,前面的企業面臨的挑戰就越多。當公眾觀念發生變化,消費者習慣隨著技術進步而轉變時,企業本身無法抗拒這種變化。通用汽車也有類似的轉變。電動化、智能網聯、自動駕駛和共享服務的結合將推動未來個人出行模式的實現。該公司致力于開發先進技術,將全球資源與當地優勢相結合,積極推動汽車行業從傳統制造業向智能出行服務業轉型。
咨詢公司Navigant的一份新報告《Navigant自動駕駛領導委員會》引起了汽車行業的廣泛關注。報告對19家具有代表性的無人駕駛汽車公司進行了排名。
它分為四類:領導者、競爭對手、挑戰者和追隨者:領導者:通用汽車、福特汽車公司、Waymo(谷歌)、大眾汽車(以奧迪為主)、戴姆勒-博世、雷諾-日產聯盟、Ampofo(德爾福分離)、寶馬-英特爾-菲亞特克萊斯勒競爭對手:沃爾沃-奧托立夫-愛立信-智能、PSA等。豐田、現代挑戰者:優步、特斯拉,本田和蘋果通用汽車(Apple General Motors)斥資10億美元收購了舊金山一家名為Cruise Automation的小型軟件公司(致力于開發無人駕駛技術),并將利用此次收購彌補其無人駕駛技術空缺,這將幫助通用汽車在無人駕駛汽車領域贏得一席之地。通用汽車賦予Cruise首席執行官Kyle Vogt足夠的自主權和影響力,不僅可以保持原有的獨立運營機制,還可以輕松獲得汽車設計和底層架構。巡航工程師可以與通用汽車的工程師密切合作,通用汽車要求聯邦政府批準明年開始生產無方向盤或踏板的改裝Bolt。根據未來的形式,基于Bolt的開發也是暫時的狀態,最終的自動駕駛汽車將以SAV的形式出現。如下圖所示,符合要求的電動汽車是按照共享運營模式設計的,以充分發揮電動汽車和自動駕駛的優勢。
通過通用汽車發布的“2018自動駕駛安全報告”,我們梳理了通用汽車自動駕駛的一些核心安全設計注意事項。這款車基于無需駕駛員即可安全行駛的理念,在設計、開發、制造、測試和驗證的方方面面都充分考慮了安全性。自動駕駛系統從開發初期就集成到車輛中,在與軟硬件團隊的密切合作下,通用汽車已經完成了系統的所有潛在故障模式評估,并逐一解決了這些問題,以確保車輛的安全性和可靠性。首先,我們看到,為了實現“感應”功能,車輛的傳感器系統配備了1)五個激光雷達:激光雷達是最關鍵的,五個激光天線都布置在車頂上。2) 16個攝像頭:這些密集的攝像頭在車輛的不同位置從不同角度獲取圖像數據……
。這些圖像數據是激光雷達的數據補充,也是重要的傳感來源。3) 二十一個雷達:雷達是激光雷達的補充。使用毫米波雷達的數據,我們可以看到低反射率的聯合雷達:前1側2,用于檢測前方和側面的移動車輛,以及用于需要檢測更大視野中的移動的車輛的長距離雷達:前2和后2,共四個。近程雷達用于探測前后車輛和測量車輛速度:有10個近程雷達,主要用于探測車輛附近的物體,主要是行人、自行車和其他重要物體。這些傳感器數據使車輛能夠識別復雜的環境。值得一提的是,常用的傳感器可以覆蓋短程和遠程,并具有360度視角。當兩個傳感器一起使用時,速度數據不再是問題。相機也是激光雷達的補充,因為它可以測量物體發射或反射的光的強度,這樣“大腦”就可以獲得物體的更多細節。兩者結合后,車輛在做出決策時更有信心。在確定了空間和時間之后,車輛可以規劃路徑。
圖這輛車(第三代)配備了各種傳感傳感器系統,覆蓋了外部的360度自動駕駛計算平臺:計算“大腦”的關鍵是計算“頭腦”,計算平臺可以讓車輛掌握世界各地的情況并制定安全的駕駛計劃。單一的技術無法使“大腦”順利運轉。它是各種尖端技術的結晶,包括行為控制、機器學習、模擬、感知、定位、映射、規劃、路線分配和網絡。感知、規劃和控制是車輛在駕駛過程中感知周圍環境并做出決策的關鍵支柱。Perception使用傳感器監測周圍環境并構建3D模型。傳感器負責將信息輸入計算平臺,對物體進行算法檢測和分類,確定物體在外部環境中的位置、速度和方向規劃,將決定車輛的行為,并將參考道路交通法律法規為車輛制定正式的路徑,并找到適合自己駕駛的道路。在這個系統中,還將對可駕駛區域進行設計和分類,使自動駕駛系統不會將車輛行駛到無法控制的區域和路線。規劃過程基于外部因素,如車輛位置、其他車道上車輛的預期移動、交通管理、路標和交通法規。將對許多道路進行分析,并根據當時的情況做出最佳決策。如果出現意外情況,將在決策中采取備份計劃。Control負責執行“計劃”命令,并控制轉向系統、節氣門、制動器和動力系統的操作。控制功能基于車輛原有的車輛穩定性、牽引力和防抱死制動系統,可根據上層規劃完成實際規避動作。
通用系統安全項目融合了行業內通行的工程標準、多年的汽車制造經驗以及其他行業(航空航天、制藥和國防)的許多苛刻標準。自動駕駛汽車的多樣性、魯棒性和冗余性與航空航天相似。系統安全過程中有兩個關鍵部分,即迭代設計的安全性和集成風險控制和深度集成的安全性。兩套計算系統同時工作:重點提高系統掌握車輛完整控制的能力,包括加速、制動、轉向和決策。該計算系統進行了全面的診斷和分析,以識別潛在的安全風險和挑戰,并找出相應的對策。兩套電源系統:設計了兩套由高壓電池轉換而成的電源系統,并配置了額外的冗余電池供電核心傳感器。信號傳輸系統:兩套計算系統、關鍵傳感器和執行器之間的通信采用額外的冗余碰撞執行:主要采用兩套執行方法……
或制動,其可以是前制動器和后制動器的獨立控制以確保車輛的可控性。車輛定位:通過各種方法確定車輛的位置是核心基礎。
對于通用汽車來說,它之前花了很多錢收購了Cruiseautomation,然后配置了相應的電動汽車工程團隊進行對接,然后密歇根州獵戶座的裝配廠使用量產技術制造自動駕駛汽車。在底特律附近的裝配廠批量生產了130輛配備新一代自動駕駛技術的測試車輛,并加入了由50輛自動駕駛汽車組成的原始測試車隊,在舊金山、亞利桑那州斯科茨代爾和密歇根州底特律進行了公共道路測試。超級巡航的第二部分嚴格來說,通用汽車輔助駕駛的原始工程團隊采用了漸進的發展道路。基于之前的積累,L2級駕駛員輔助系統(超級巡航)已搭載在北美上市的2018款凱迪拉克CT6上。
備注:在其自身的系統下,當時被稱為CSAV 2,綜合安全和自適應車輛2超級巡航由三部分組成:自適應巡航系統、藍線保持系統和駕駛員注意力保持系統。1.自適應巡航系統:通過毫米波雷達監測前方車輛,確保以安全的速度行駛。這是一個全速ACC系統,工作速度為0-89英里/小時(0-144公里/小時),這意味著即使前車再次停止和啟動,Super Cruise也可以在不中斷和不手動干預的情況下跟隨車輛。2.駕駛員注意力保持系統:通過車內方向盤附近的微型攝像頭和紅外傳感器實時監測駕駛員的視線是否保持在道路上。3.藍線車道中心保持系統:前方攝像頭和兩側全景攝像頭主要用于識別左右兩側的路標,判斷車道中心位置和方向。通過高精度地圖提供的道路曲率數據、車道編號、上下匝道等道路屬性信息,利用高精度GPS進行定位,獲取道路沿線的縱向偏移距離,確定車輛所在的車道。在整合信息后,可以形成沿著車道中心的虛擬車輛控制路徑(車輛可以自動行駛)。在此過程中,需要提前與地圖供應商合作,通過激光雷達繪制高速公路地圖,為超級巡航的開通設置地理圍欄。當系統確定車輛當前處于有效區域,車輛處于車道中央,傳感器可以正常工作時,儀表板上將出現一個白色的超級巡航圖標,表明超級巡航處于待機狀態。此時,按下下方向盤上的超級巡航按鈕,功能將正式開啟,儀表板上的圖標將變為綠色,這樣駕駛員就可以用雙手和雙腳離開方向盤和油門制動器。
當使用該功能時,當系統檢測到車主被紅外分心時,或者當系統判斷外部環境超過設定閾值(車道線不清晰、GPS信號微弱等)時,系統會提示駕駛員立即接管車輛。如果第一級警告在5秒內沒有得到反饋,系統將自動進入第二級警告。當綠色閃爍轉為紅色閃爍時,會伴隨報警聲或座椅振動。如果駕駛員在10秒內仍未把手放在方向盤上,他將進入第三級警告,Onstar后臺操作員將接通,超級巡航功能將停止。如果駕駛員在第三級警告下仍然沒有把手放在方向盤上,系統將判斷車輛失控,并自動停在當前車道上。從這個角度來看,這個功能在原來的TJA的基礎上進行了更好的優化,并且會高速開啟。與奧迪的zFAS相比,宣傳力度較弱,體驗確實相似。
ostI}/img/20230304012844096742/11.jpg“/>
在某種程度上,這比自動駕駛在濫用方面要好,而且它可以在某些路段幫助車主。事實上,國內的高速環境相當奇怪。使用上有許多限制。我個人認為,自動駕駛之路應該從兩個方面走,內部對安全機制的考慮是相似的。在這里,使用類似的DV驗證來驗證自動駕駛系統,并實施系統安全分析方法,以構建與原始車輛系統兼容的安全設計理念。這兩者都需要從車輛遠程控制和系統總線的角度來考慮。由于整個網絡的特點,車輛和后臺緊密相連,這也增加了系統信息安全的難度。從電氣架構來看,Cruise更為基礎。例如,大量的通信、電氣和接口線束從車輛的下部連接到頂部的信息感知系統,而汽車后部的計算系統是整個自動駕駛汽車的核心區域。原有的Onstar車輛耦合系統完全不足,尤其是之前計算系統的原始數據采集,因此采用了獨立的數據采集系統,實現了200MB/s的存儲和采集能力,當然,還構建了從原有Onstar獲取車輛原始總線信息的能力。如下圖所示,通過這些數據可以恢復整個感知場景和車輛的運行情況。總結:未來的車企必然會面臨轉型,尤其是在新車戰略逐漸行不通的情況下,需要在現有的商業模式和新的商業模式上下功夫。如果第一級警告在5秒內沒有得到反饋,系統將自動進入第二級警告。當綠色閃爍轉為紅色閃爍時,會伴隨報警聲或座椅振動。如果駕駛員在10秒內仍未把手放在方向盤上,他將進入第三級警告,Onstar后臺操作員將接通,超級巡航功能將停止。如果駕駛員在第三級警告下仍然沒有把手放在方向盤上,系統將判斷車輛失控,并自動停在當前車道上。從這個角度來看,這個功能在原來的TJA的基礎上進行了更好的優化,并且會高速開啟。與奧迪的zFAS相比,宣傳力度較弱,體驗確實相似。
0
在某種程度上,這比自動駕駛在濫用方面要好,而且它可以在某些路段幫助車主。事實上,國內的高速環境相當奇怪。使用上有許多限制。我個人認為,自動駕駛之路應該從兩個方面走,內部對安全機制的考慮是相似的。在這里,使用類似的DV驗證來驗證自動駕駛系統,并實施系統安全分析方法,以構建與原始車輛系統兼容的安全設計理念。這兩者都需要從車輛遠程控制和系統總線的角度來考慮。由于整個網絡的特點,車輛和后臺緊密相連,這也增加了系統信息安全的難度。從電氣架構來看,Cruise更為基礎。例如,大量的通信、電氣和接口線束從車輛的下部連接到頂部的信息感知系統,而汽車后部的計算系統是整個自動駕駛汽車的核心區域。原有的Onstar車輛耦合系統完全不足,尤其是之前計算系統的原始數據采集,因此采用了獨立的數據采集系統,實現了200MB/s的存儲和采集能力,當然,還構建了從原有Onstar獲取車輛原始總線信息的能力。如下圖所示,通過這些數據可以恢復整個感知場景和車輛的運行情況。總結:未來的車企必然會面臨轉型,尤其是在新車戰略逐漸行不通的情況下,需要在現有的商業模式和新的商業模式上下功夫。
繼友友用車和EZZY去年相繼宣布停運后,日前,共享汽車領域又有新的玩家撐不下去了。日前,麻瓜出行宣布從5月20日起正式停止服務,同時押金、充值金額等都可以申請退還。
1900/1/1 0:00:005月31日,國家電網公布了2018年電源項目第二次物資(第一次充電樁)招標采購采購中標人信息,本次招標共有30家公司幸運中標,中標總額約848億。下面我們看一下具體中標情況。
1900/1/1 0:00:005月2931日,為推進京津冀三地協同開展新能源汽車動力蓄電池回收利用試點工作,加快建立京津冀區域新能源汽車動力蓄電池回收利用體系,
1900/1/1 0:00:00近期,寧德時代(300750)在資本市場上的每一步,都引來一片追捧與狂歡。但其在資本領域和動力電池領域中的巨無霸之夢,仍喜憂參半。
1900/1/1 0:00:006月1日,菲亞特克萊斯勒集團(簡稱FCA)在意大利舉行投資者大會,CEO馬爾喬內發布了集團新的五年規劃,涵蓋Jeep、公羊、阿爾法羅密歐、瑪莎拉蒂品牌。
1900/1/1 0:00:00北京威卡威汽車零部件股份有限公司(簡稱京威股份002662)的動蕩似乎遠未結束。5月21日,京威股份再次接到深交所的問詢函,問詢其為何準備賣掉旗下三家子公司,并轉讓持有的三家新能源汽車公司的股權。
1900/1/1 0:00:00