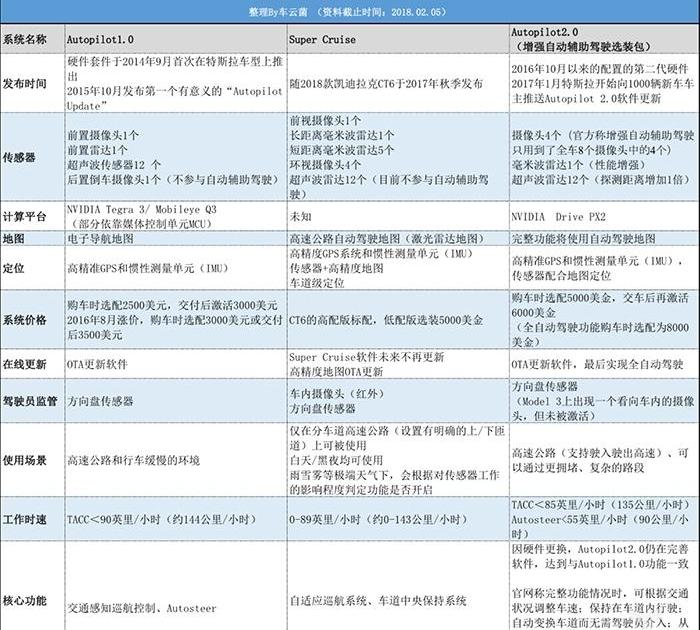
要說2018年自動駕駛領域的趨勢,應該是越來越多的駕駛員輔助系統開始進入我們的生活。例如,2018款凱迪拉克CT6的超級巡航超級巡航。這是通用汽車在逐步發展的路線上投入市場的第一個L2自動駕駛系統,它可以讓你在高速公路上放開手腳,讓車輛自己在一條車道上行駛。另一個代表是特斯拉的自動駕駛系統。該系統進入市場較早,開通場景主要是高速公路。配備該系統的車輛可以保持在車道上行駛,并應對不同的情況,這在一定程度上解放了駕駛員。馬斯克2仍在預覽中,最新版本的升級已進入最后測試階段。由于這兩個系統屬于SAE L2,許多人好奇超級巡航和自動駕駛的區別,因此本文進行了比較。在我們開始之前,讓我們做一些解釋。首先,與超級巡航一步到位的想法不同,特斯拉使用了預裝的硬件系統,然后OTA更新獲得了越來越先進的功能,所以我們偶爾看到的自動駕駛儀是不同的。目前,特斯拉已經發布了關于Autopilot 1.0、Autopilot 2.0和Autopilot 2.5幾個版本的信息。這給《車韻》的比較分析帶來了一些困難。在從Autopilot 1.0升級到Autopilot 2.0的過程中,硬件和軟件都發生了不少變化。為了理解這兩個系統的迭代思路,車云選擇了Super Cruise和Autopilot 1.0以及Autopilot 2.0增強型Autopilot可選包(截至2018年2月5日實現的功能)進行橫向比較,同時也考慮了兩家公司的整體自動駕駛發展戰略分析。第二,比較維度。SAE J3016自動駕駛儀分類為比較同級別的系統提供了一些參考尺寸。此外,自動駕駛系統通常分為硬件和軟件兩部分。硬件部分包括傳感器配置、計算平臺、執行器,軟件部分包括定位策略和決策控制算法,所有這些都將用于本次比較。基于以上內容,我們制作了這個表格,然后車云會做一些詳細的分析。
(超級巡航和自動駕駛的比較)L2功能比較當你了解自動駕駛汽車時,你會使用SAE分類來幫助你對系統級別有一個大致的了解。但事實上,SAE J3016也為理解同級別系統的細節提供了一種比較方法。其中,三個重要參數是設計工作范圍(ODD)、動態駕駛任務(DDT)和動態駕駛任務支持(DDTFallback)。1.設計運行里程(ODD)可以理解為自動駕駛汽車的安全工作環境,包括速度(高速、低速等)、地理地形(平原、山脈等)、路面條件(直道、彎路等),環境(天氣、氣候、基礎設施等)和交通條件(簡單、復雜、交通條件)超級巡航只能在分開的高速公路上使用(有清晰的上下坡道),并且可以在白天/晚上使用。在雨、雪、霧等極端天氣下,會根據對傳感器工作的影響程度來判斷功能是否開啟。工作速度為0-89英里/小時(約0-143公里/小時)。盡管許多粉絲已經在城市環境中嘗試了自動駕駛,但特斯拉的官方激活范圍仍然是高速公路和慢速路段。在Autopilot 1.0中,速度限制在90英里/小時(約144公里/小時)。Autopilot 2.0仍在用新硬件實現Autopilot 1.0的功能,因此特斯拉一直在調整限速。2.在動態駕駛任務(DDT)中,在道路上駕駛車輛時需要進行哪些操作和決策,包括車輛通過方向盤的橫向運動、車輛通過加速和減速的縱向運動方向、對車輛周圍環境的監測、相應操作的實施,通過物體和事件的檢測、認知分類和隨后的反應來規劃車輛運動和向外界傳遞信息。對于動態駕駛任務,超級巡航和自動駕駛可以以非跟車和垂直控制跟車的形式打開系統。明顯的區別在于變道。超級巡航是一個單車道L2自動駕駛系統……
如果需要變道,只需撥打轉向桿,自己觀察周圍情況,控制方向盤即可變道。變道操作完成后,系統將自動運行。當自動駕駛系統打開時,為了變道,駕駛員必須首先從視覺上確認它是安全的,就像手動駕駛一樣。然后,他必須在握住方向盤的同時啟動轉向燈,以表明他改變車道的意圖。車輛將根據駕駛員的指令改變車道。值得注意的是,對于自動轉向功能,特斯拉表示應謹慎使用水平控制。Autosteer仍然是一個測試版,仍然有一些未知的問題需要用戶選擇性地打開。DDTFallback是指在設計自動駕駛系統時,需要考慮系統故障(導致系統無法工作的故障)的發生或超出系統原始運行設計范圍的情況。這就是系統如何提供一條將風險降至最低的路徑。在這起著名的致命事故發生后,自動駕駛系統會每隔一段時間提醒駕駛員接管,以防止駕駛員用手離開方向盤。當手沒有在方向盤上施加壓力超過十秒時,系統將首先發出輕微提醒。如果駕駛員忽略,提醒級別將升級,最終車輛將自動減速停車并自動退出自動駕駛模式。此時,必須將其置于駐車狀態才能重新啟用。

超級巡航3級警告對于超級巡航,當駕駛員的注意力保持系統檢測到駕駛員分心,或駕駛環境超出系統控制范圍,如車道線不清晰、GPS信號微弱時,系統會提示駕駛員立即接管車輛。當它失敗時,它將被分為三個級別的預警。如果第一級警告在5秒內沒有得到反饋,系統將自動進入第二級警告。當綠色閃爍變為紅色閃爍時,會伴隨警報或座椅振動(用戶可以自行設置警告模式)。如果駕駛員在10秒內仍然沒有把手放在方向盤上,他將進入第三級警告,并連接前臺后臺操作員,超級巡航功能將停止,儀表板上的圖標將消失。如果你需要停車并再次點燃車輛,你需要使用它。當然,如果駕駛員在三級警告下仍然沒有把手放在方向盤上,系統會判斷車輛失控,并自行停在當前車道上。值得一提的是監督駕駛員的方式。特斯拉盯著司機的方法一直依賴于方向盤壓力,因此許多司機都用方向盤掛橙子和水瓶,以避免系統的“嘮叨”。相比之下,Super Cruise解放了司機的雙手,用紅外攝像頭(可以在夜間監控面部)監控司機的狀態,并提醒他在司機注意力不在路上時接管。Autopilot似乎已經意識到了這個漏洞所帶來的安全風險。細心的人發現,Model 3上開始出現一個可以觀察汽車的攝像頭。盡管它還沒有被激活,但特斯拉很可能會使用車內的攝像頭來監視司機。硬件和軟件配置的比較首先取決于硬件配置。據車云介紹,超級巡航和自動駕駛的主要前向功能是通過前瞻性攝像頭和前瞻性毫米波雷達實現的。據一些媒體報道,即使在自動駕駛2.0(馬斯克曾表示,自動駕駛2.0的硬件設備是為了實現全自動駕駛)中,特斯拉自研的視覺系統也有八個攝像頭(因為之前與Mobileye分手),但特斯拉最初只打算使用前瞻性攝像頭和毫米波雷達來綁定自動駕駛1.0的功能,一些愛好者也通過屏蔽攝像頭來測試這一點。后來,Autopilot 2.0在第三只眼睛啟用了另一個前置攝像頭,可以實現同樣的功能,并獲得更好的決策效果。不同的是,Super Cruise在一周內為車身的感知增加了更多的冗余,并試圖確保在一個方向上有兩個傳感器:攝像頭和毫米波雷達。特斯拉在Autopilot 2.0中使用的四個攝像頭應該是三眼攝像頭……
一個后視鏡,車身兩側沒有“環視+超聲波”的“雙重保險”。在計算平臺方面,我們沒有得到CT6的詳細信息。然而,隨著Autopilot 1.0向Autopilot 2.0的轉變,我們已經驗證了一種趨勢,即Autopilot 3.0使用媒體控制單元的一部分MCU進行計算,而Autopilot 4.0使用了一個特殊的自動駕駛計算平臺,包括最近特斯拉宣布的硬件更新和關于該系統在自研芯片上的傳言,這一切都代表著隨著自動駕駛的發展,芯片需要大幅升級,OEM和芯片公司將越來越近。
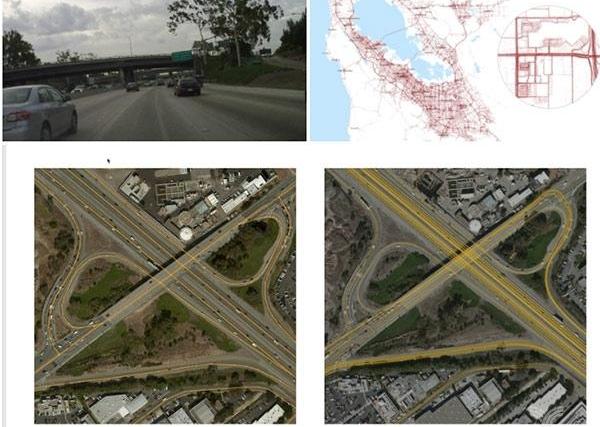
(在Autopilot 1.0發布時,提到了高精度地圖。)在導航方面,超級巡航和自動駕駛都使用了高精度GPS和慣性測量單元來幫助定位,超級巡航的定位精度達到了車道線水平。雙方的明顯區別在于地圖。盡管馬斯克在Autopilot 1.0發布的國外新聞發布會上表示,Autopilot將使用更準確的自動駕駛地圖來輔助導航,但一些缺陷和功能限制表明,Autopiot很可能使用普通的電子導航地圖。Super Cruise率先使用了自動駕駛激光雷達地圖,提供道路曲率數據、車道編號、上下坡道等道路屬性信息。通用汽車將每季度通過OTA更新自動駕駛地圖數據。眾所周知,高精度地圖是自動駕駛不可或缺的工具。在駕駛輔助功能中使用高精度地圖,Super Cruise在決策和控制方面具有明顯的安全效果。例如,在上下坡道時,安全保障與車輛的轉向和制動控制系統相匹配,從而幫助車輛更好地預測和轉向,實現安全控制。此外,據消息稱,特斯拉將在autopilot 2.0中使用自動駕駛地圖(合作伙伴很可能是Mapbox和Valhalla),以便在完整版功能中實現“從一條高速公路切換到另一條高速公路,以及在接近目的地時駛出高速公路”這兩個動作。此外,在軟件算法方面,車云認為測試也是一個比較維度,因為健壯的軟件需要不同環境下的道路數據來饋送,而這些數據來自長時間的測試。通用汽車沒有說明是否升級超級巡航的軟件,只是明確表示將更新自動駕駛地圖。然而,通用汽車在全自動駕駛測試方面投入了大量資金,使其成為測試車隊中最大的原始設備制造商之一。今年年初,通用汽車正式發布了第四代自動駕駛汽車,并向美國公路安全管理局(NHTSA)提交了申請。這款自動駕駛汽車計劃于2019年投入使用。屆時,通用汽車將在實際運營環境中收集數據,以這種方式收集的數據將更有針對性,并為商業化積累經驗。特斯拉的所有庫存汽車都將成為自動駕駛測試車。由于其龐大的客戶群,這個非自愿團隊通過車內的“陰影模式”實現了對自動駕駛技術的測試。當Autopilot 1.0更新為Autopilot 2.0時,特斯拉官方宣布其已經積累了13億英里的Autopilot數據,“幾乎所有”數據都對Autopilot 3.0有用。車云總結總的來說,超級巡航更多地考慮了安全性,并在感知中使用了更多的傳感器和地圖冗余來確保安全。自動駕駛功能更豐富。馬斯克通過提前通知和更新的方式,以傳統車企無法比擬的速度不斷推動自動駕駛的升級。然而,對于用戶來說,使用仍需改進的測試版一直是一個有爭議的話題。如果我們只看現在,兩家來自不同背景的公司,因為不同的DNA,一種產品更保守,另一種更激進。但展望未來,他們選擇了不同的方法來實現自動駕駛的最終理想和階段目標。目前的水平并不是所有自動駕駛公司的最終目標。畢竟,在技術完全實現之前,任何自動駕駛系統都只是一個過渡版本。要說2018年自動駕駛領域的趨勢,應該是越來越多的駕駛員輔助系統開始進入我們的生活。例如,2018款凱迪拉克CT6的超級巡航超級巡航。這是通用汽車在逐步發展中投入市場的第一個L2自動駕駛系統……
nt路線,讓你在高速公路上放開手腳,讓車輛在一條車道上自行行駛。另一個代表是特斯拉的自動駕駛系統。該系統進入市場較早,開通場景主要是高速公路。配備該系統的車輛可以保持在車道上行駛,并應對不同的情況,這在一定程度上解放了駕駛員。馬斯克2仍在預覽中,最新版本的升級已進入最后測試階段。由于這兩個系統屬于SAE L2,許多人好奇超級巡航和自動駕駛的區別,因此本文進行了比較。在我們開始之前,讓我們做一些解釋。首先,與超級巡航一步到位的想法不同,特斯拉使用了預裝的硬件系統,然后OTA更新獲得了越來越先進的功能,所以我們偶爾看到的自動駕駛儀是不同的。目前,特斯拉已經發布了關于Autopilot 1.0、Autopilot 2.0和Autopilot 2.5幾個版本的信息。這給《車韻》的比較分析帶來了一些困難。在從Autopilot 1.0升級到Autopilot 2.0的過程中,硬件和軟件都發生了不少變化。為了理解這兩個系統的迭代思路,車云選擇了Super Cruise和Autopilot 1.0以及Autopilot 2.0增強型Autopilot可選包(截至2018年2月5日實現的功能)進行橫向比較,同時也考慮了兩家公司的整體自動駕駛發展戰略分析。第二,比較維度。SAE J3016自動駕駛儀分類為比較同級別的系統提供了一些參考尺寸。此外,自動駕駛系統通常分為硬件和軟件兩部分。硬件部分包括傳感器配置、計算平臺、執行器,軟件部分包括定位策略和決策控制算法,所有這些都將用于本次比較。基于以上內容,我們制作了這個表格,然后車云會做一些詳細的分析。
(超級巡航和自動駕駛的比較)L2功能比較當你了解自動駕駛汽車時,你會使用SAE分類來幫助你對系統級別有一個大致的了解。但事實上,SAE J3016也為理解同級別系統的細節提供了一種比較方法。其中,三個重要參數是設計工作范圍(ODD)、動態駕駛任務(DDT)和動態駕駛任務支持(DDTFallback)。1.設計運行里程(ODD)可以理解為自動駕駛汽車的安全工作環境,包括速度(高速、低速等)、地理地形(平原、山脈等)、路面條件(直道、彎路等),環境(天氣、氣候、基礎設施等)和交通條件(簡單、復雜、交通條件)超級巡航只能在分開的高速公路上使用(有清晰的上下坡道),并且可以在白天/晚上使用。在雨、雪、霧等極端天氣下,會根據對傳感器工作的影響程度來判斷功能是否開啟。工作速度為0-89英里/小時(約0-143公里/小時)。盡管許多粉絲已經在城市環境中嘗試了自動駕駛,但特斯拉的官方激活范圍仍然是高速公路和慢速路段。在Autopilot 1.0中,速度限制在90英里/小時(約144公里/小時)。Autopilot 2.0仍在用新硬件實現Autopilot 1.0的功能,因此特斯拉一直在調整限速。2.在動態駕駛任務(DDT)中,在道路上駕駛車輛時需要進行哪些操作和決策,包括車輛通過方向盤的橫向運動、車輛通過加速和減速的縱向運動方向、對車輛周圍環境的監測、相應操作的實施,通過物體和事件的檢測、認知分類和隨后的反應來規劃車輛運動和向外界傳遞信息。對于動態駕駛任務,超級巡航和自動駕駛可以以非跟車和垂直控制跟車的形式打開系統。明顯的區別在于變道。超級巡航是一種單車道L2自動駕駛系統。如果需要變道,只需撥打轉向桿,自己觀察周圍情況,控制方向盤即可變道。變道操作完成后,系統將自動運行。當自動駕駛系統打開時,為了變道,駕駛……
必須首先從視覺上確認它是安全的,就像他手動駕駛時一樣。然后,他必須在握住方向盤的同時啟動轉向燈,以表明他改變車道的意圖。車輛將根據駕駛員的指令改變車道。值得注意的是,對于自動轉向功能,特斯拉表示應謹慎使用水平控制。Autosteer仍然是一個測試版,仍然有一些未知的問題需要用戶選擇性地打開。DDTFallback是指在設計自動駕駛系統時,需要考慮系統故障(導致系統無法工作的故障)的發生或超出系統原始運行設計范圍的情況。這就是系統如何提供一條將風險降至最低的路徑。在這起著名的致命事故發生后,自動駕駛系統會每隔一段時間提醒駕駛員接管,以防止駕駛員用手離開方向盤。當手沒有在方向盤上施加壓力超過十秒時,系統將首先發出輕微提醒。如果駕駛員忽略,提醒級別將升級,最終車輛將自動減速停車并自動退出自動駕駛模式。此時,必須將其置于駐車狀態才能重新啟用。
超級巡航3級警告對于超級巡航,當駕駛員的注意力保持系統檢測到駕駛員分心,或駕駛環境超出系統控制范圍,如車道線不清晰、GPS信號微弱時,系統會提示駕駛員立即接管車輛。當它失敗時,它將被分為三個級別的預警。如果第一級警告在5秒內沒有得到反饋,系統將自動進入第二級警告。當綠色閃爍變為紅色閃爍時,會伴隨警報或座椅振動(用戶可以自行設置警告模式)。如果駕駛員在10秒內仍然沒有把手放在方向盤上,他將進入第三級警告,并連接前臺后臺操作員,超級巡航功能將停止,儀表板上的圖標將消失。如果你需要停車并再次點燃車輛,你需要使用它。當然,如果駕駛員在三級警告下仍然沒有把手放在方向盤上,系統會判斷車輛失控,并自行停在當前車道上。值得一提的是監督駕駛員的方式。特斯拉盯著司機的方法一直依賴于方向盤壓力,因此許多司機都用方向盤掛橙子和水瓶,以避免系統的“嘮叨”。相比之下,Super Cruise解放了司機的雙手,用紅外攝像頭(可以在夜間監控面部)監控司機的狀態,并提醒他在司機注意力不在路上時接管。Autopilot似乎已經意識到了這個漏洞所帶來的安全風險。細心的人發現,Model 3上開始出現一個可以觀察汽車的攝像頭。盡管它還沒有被激活,但特斯拉很可能會使用車內的攝像頭來監視司機。硬件和軟件配置的比較首先取決于硬件配置。據車云介紹,超級巡航和自動駕駛的主要前向功能是通過前瞻性攝像頭和前瞻性毫米波雷達實現的。據一些媒體報道,即使在自動駕駛2.0(馬斯克曾表示,自動駕駛2.0的硬件設備是為了實現全自動駕駛)中,特斯拉自研的視覺系統也有八個攝像頭(因為之前與Mobileye分手),但特斯拉最初只打算使用前瞻性攝像頭和毫米波雷達來綁定自動駕駛1.0的功能,一些愛好者也通過屏蔽攝像頭來測試這一點。后來,Autopilot 2.0在第三只眼睛啟用了另一個前置攝像頭,可以實現同樣的功能,并獲得更好的決策效果。不同的是,Super Cruise在一周內為車身的感知增加了更多的冗余,并試圖確保在一個方向上有兩個傳感器:攝像頭和毫米波雷達。特斯拉在Autopilot 2.0中使用的四個攝像頭應該是三眼攝像頭和后視攝像頭,并且車身兩側沒有“環視+超聲波”的“雙重保險”。在計算平臺方面,我們沒有得到CT6的詳細信息。然而,隨著從Autopilot 1.0到Autopilot 2.0的變化,我們已經驗證了一個趨勢,即Autopilot使用一部分……
媒體控制單元的MCU進行計算,autopilot 2.0使用了一個特殊的自動駕駛計算平臺,包括最近特斯拉宣布的硬件更新和自研芯片上系統的傳言,這些都代表著隨著自動駕駛的發展,芯片需要大幅升級,OEM和芯片公司將越來越近。
(在Autopilot 1.0發布時,提到了高精度地圖。)在導航方面,超級巡航和自動駕駛都使用了高精度GPS和慣性測量單元來幫助定位,超級巡航的定位精度達到了車道線水平。雙方的明顯區別在于地圖。盡管馬斯克在Autopilot 1.0發布的國外新聞發布會上表示,Autopilot將使用更準確的自動駕駛地圖來輔助導航,但一些缺陷和功能限制表明,Autopiot很可能使用普通的電子導航地圖。Super Cruise率先使用了自動駕駛激光雷達地圖,提供道路曲率數據、車道編號、上下坡道等道路屬性信息。通用汽車將每季度通過OTA更新自動駕駛地圖數據。眾所周知,高精度地圖是自動駕駛不可或缺的工具。在駕駛輔助功能中使用高精度地圖,Super Cruise在決策和控制方面具有明顯的安全效果。例如,在上下坡道時,安全保障與車輛的轉向和制動控制系統相匹配,從而幫助車輛更好地預測和轉向,實現安全控制。此外,據消息稱,特斯拉將在autopilot 2.0中使用自動駕駛地圖(合作伙伴很可能是Mapbox和Valhalla),以便在完整版功能中實現“從一條高速公路切換到另一條高速公路,以及在接近目的地時駛出高速公路”這兩個動作。此外,在軟件算法方面,車云認為測試也是一個比較維度,因為健壯的軟件需要不同環境下的道路數據來饋送,而這些數據來自長時間的測試。通用汽車沒有說明是否升級超級巡航的軟件,只是明確表示將更新自動駕駛地圖。然而,通用汽車在全自動駕駛測試方面投入了大量資金,使其成為測試車隊中最大的原始設備制造商之一。今年年初,通用汽車正式發布了第四代自動駕駛汽車,并向美國公路安全管理局(NHTSA)提交了申請。這款自動駕駛汽車計劃于2019年投入使用。屆時,通用汽車將在實際運營環境中收集數據,以這種方式收集的數據將更有針對性,并為商業化積累經驗。特斯拉的所有庫存汽車都將成為自動駕駛測試車。由于其龐大的客戶群,這個非自愿團隊通過車內的“陰影模式”實現了對自動駕駛技術的測試。當Autopilot 1.0更新為Autopilot 2.0時,特斯拉官方宣布其已經積累了13億英里的Autopilot數據,“幾乎所有”數據都對Autopilot 3.0有用。車云總結總的來說,超級巡航更多地考慮了安全性,并在感知中使用了更多的傳感器和地圖冗余來確保安全。自動駕駛功能更豐富。馬斯克通過提前通知和更新的方式,以傳統車企無法比擬的速度不斷推動自動駕駛的升級。然而,對于用戶來說,使用仍需改進的測試版一直是一個有爭議的話題。如果我們只看現在,兩家來自不同背景的公司,因為不同的DNA,一種產品更保守,另一種更激進。但展望未來,他們選擇了不同的方法來實現自動駕駛的最終理想和階段目標。目前的水平并不是所有自動駕駛公司的最終目標。畢竟,在技術完全實現之前,任何自動駕駛系統都只是一個過渡版本。
T恤加馬甲,離開上汽集團后的張海亮脫去了西服襯衫的束縛,越來越隨意、灑脫。他不玩微博、朋友圈也只是發了寥寥數條全和電咖有關。這是一位“非典型”的互聯網造車人。
1900/1/1 0:00:00據外媒報道,太平洋西北國家實驗室(PacificNorthwestNationalLaboratory,PNNL)的研究人員正在研發一款預見性軟件工具,
1900/1/1 0:00:001、長春新建住宅停車位應100建充電樁長春發布《長春市電動汽車充電基礎設施建設運營管理暫行辦法》要求,新建住宅配建停車位應100建設充電基礎設施或預留建設安裝條件。
1900/1/1 0:00:001月4日,中國鐵塔公司在北京與重慶長安、比亞迪、銀隆新能源、沃特瑪、國軒高科、桑頓新能源等16家企業,舉行了新能源汽車動力蓄電池回收利用戰略合作伙伴協議簽約儀式。
1900/1/1 0:00:00卡蘭尼克據《華爾街日報》北京時間2月6日報道,硅谷多年來的最大一場官司在2月5日開庭審判。
1900/1/1 0:00:00BobLutz爺爺的“汽車行業消失論”給我很大觸動。帶著諸如“汽車會和馬車一樣消失?未來的汽車還是汽車嗎?”的疑問,我到達拉斯維加斯,在CES2018尋找答案。
1900/1/1 0:00:00